・上一文章:基于VB与单片机的温度测控系统设计
・下一文章:基于MPC5125设计的开发评估方案
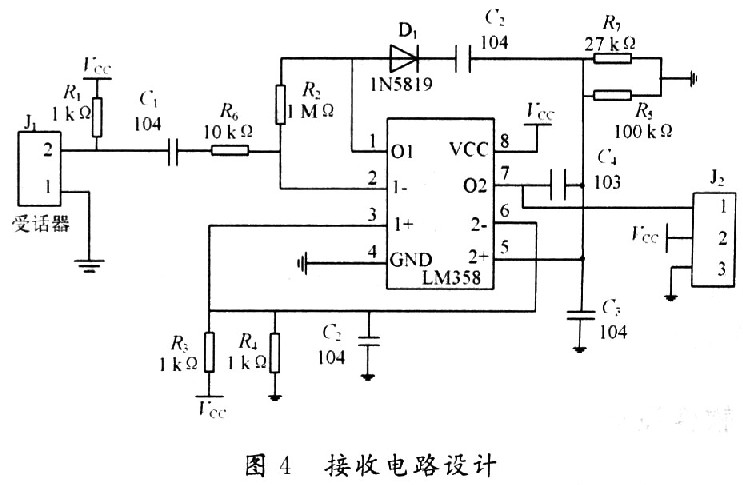
2.2 接收器电路设计
接收器电路主要用于接收可移动声源发出的音频脉冲信号,然后传送给单片机(MCUl),由单片机1(MCUl)对接收器接收到声源信号的时间做处理,检测出当前小车的位置,然后通过无线发送给单片机2(MCU2)。所以能不能很好地接收到音频信号是整过设计的关键。设计考虑接收器的信号采集传感器采用MIC,将采集信号放大、滤波、整形,产生方波信号,传送给单片机,由于MIC灵敏度较高,受外界噪声干扰较大,中间加高通滤波电路,可实现对声源信号的接收。电路图如图4所示。
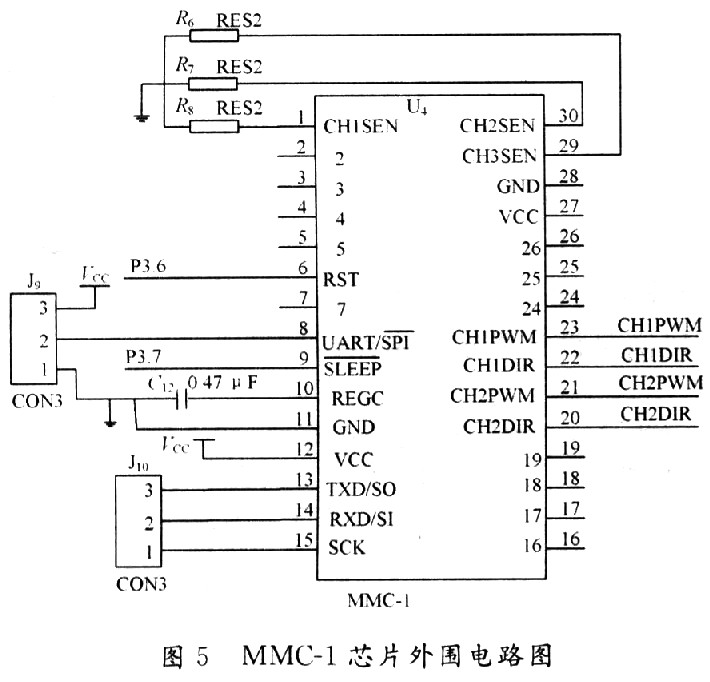
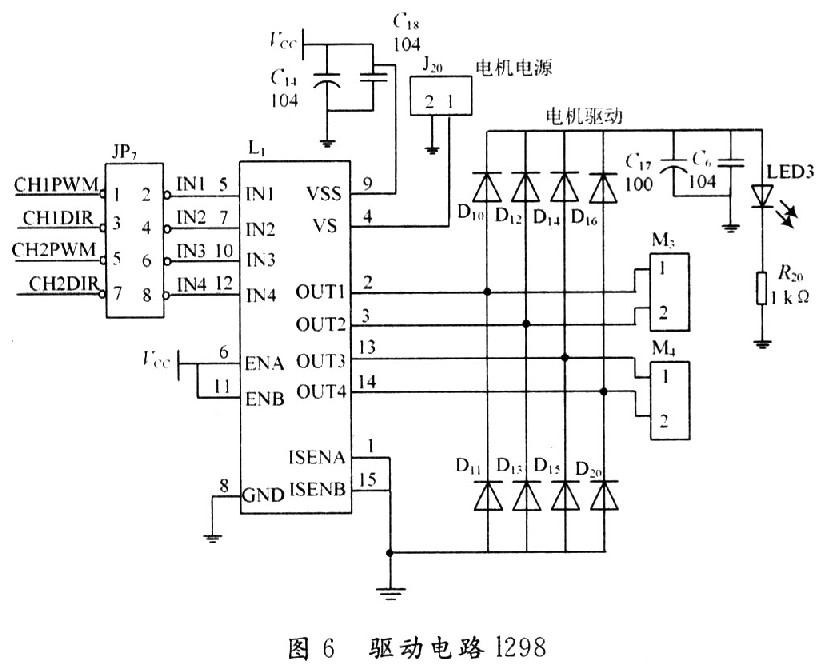
2.3 小车控制电路设计
小车控制电路设计采用NEC的电机控制ASSP芯片(型号MMC-1)实现可移动声源的运动,用UART模式和ASSP芯片进行通信使之提供控制信号,再用L298驱动电机转动。L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50 V,可以直接通过电源来调节输出电压;可以直接用ASSP芯片口提供信号;而且电路简单,使用比较方便。通过控制L298的INl,IN2,IN3,IN4输入端控制电机的转速及转向。此方案接口简单,不占用系统资源。
2.4 小车转向精度控制及路程计算
小车转向精度控制及路程计算的方案有多种,考虑到安装的复杂和调试容易程度,设计采用反射式光电对管,对车轮上的黑白码盘检测,产生脉冲计数,从而计算小车行驶路程和转向控制。
3 软件设计
3.1 软件设计说明
在小车程序中,一开始打开无线接收,在收到数据后进行判断小车是否到达预定位置,如果没有到达则继续由算法控制计算PWM值,由PWM值控制电机的转速和转向;如果收到数据后判断到达了预定位置,则发出声光信号指示到达了预定位置。
对于监测端程序设计,首先对测量值通过滤波算法进行滤波,然后将上次的测量值发送,再将定时器清零,判断INT3是否有下降沿到来,如果没有监测到下降沿,则继续等待,如果有,则开定时器,开中断,延时100μs后又继续对测量值滤波。

")

")

