2.2 温控算法
温控系统采用数字PID算法,并由软件实现,所谓PID控制就是按设定值与测量值之间偏差的比例、偏差的积累和偏差变化的趋势进行控制。它根据采样时刻的偏差值计算控制量。因此PID控制律的实现,必须用数值逼近法。当采样周期相当短时,可以用求和代替积分,用差商代替微分,即做如下近似变换:
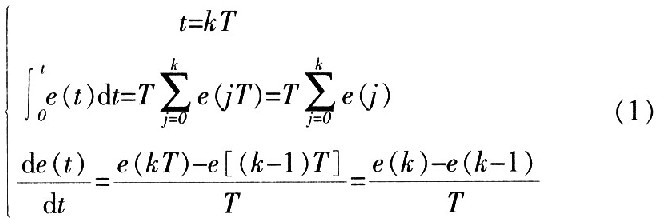
式中,k为采样序号,k=l,2,…;T为采样周期。
显然,上述离散化过程中,采样时间T必须足够短,才能保证有足够的精度。为了书写方便,将e(kT)简化表示成e(k)等,即省去T。可以得到离散的PID表达式为:

式中,k为采样序号,k=1,2,…,;u(k)为第k次采样时刻的计算机输出值;e(k)为第k次采样时刻输入的偏差值;e(k-1)为第(k-1)次采样时刻输入的偏差值;K1为积分系数,
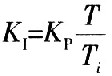
;KD为积分系数

。
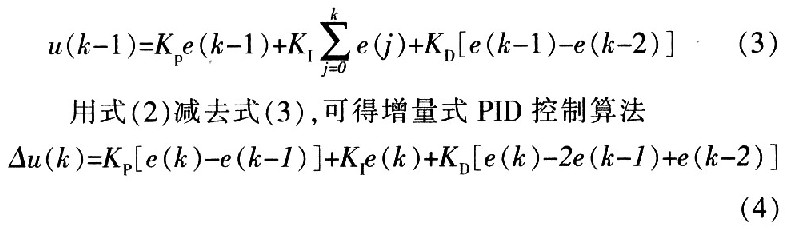
该系统采用增量式PID控制算法,是指数字控制器输出只是控制量的增量,该算法编程简单,数据可以递推使用,占用存储空间少,运算快。
根据递推原理可得:
 3 结束语
3 结束语 本文主要从硬件和软件两个方面具体描述了基于数字PID的89C52单片机温度控制系统的构造。该系统充分发挥了89C52单片机对模拟量的采集处理和增量式数字PID控制算法的功能,可以比较灵活的调节控制信号的导通时间来控制加热电路和冷却电路的工作。该系统基本满足了温度控制的要求,具有超调量小,振荡幅度小,设定值可以随时用按键人为设定等优点,同时该系统还避免了控制过程中的不确定性及噪声,提高了系统的工作效率。理论和实践证明,该系统具有高可靠性、高性价比、控制简单方便等优点,大大提高测量的精度。
上一页 [1] [2] [3] 下一页

")

")

