·上一文章:在柴油发动机中应用臭氧助燃技术
·下一文章:关于节能与新能源汽车产业发展规划
3. 2 模糊控制软件测试
为了检测硬件是否能够正常进行基本的工作,可用一个简单的应用程序:
将单片机的 Pl 口先清零,然后向这个口送立即数,那么显示器上将显示这个立即数。程序如下:
ORG 0000H
AJMP START:
START MOV Pl,#08H
END
经过编译,调试运行后,显示器上便显示了 0707,工作基本正常。然后将输出控制继电器的三个口置于“0”看其工作情况。程序如下:
ORG0001H
AJMP START:
START CLR P2. 0
CLR P2. 1
CLR P2. 2
End
经编译调试后,代替继电器的发光二极管均亮,表示工作正常。
4 基于单片机的太阳热水器模糊控制系统的仿真研究
为了说明模糊控制器性能的优劣,采用了 MAT-LAB 软件,用 MATLAB 的 SIMULINK 工具箱建立仿真模型。
4. 1 仿真实验基本过程
建立数学模型→建立仿真模型→编写仿真程序→进行仿真实验并分析实验结果。
4. 2 系统仿真模型的建立
系统的仿真模型大致可分为三个部分: 主电路部分、控制部分和测量部分。图 6 为系统的仿真模型。
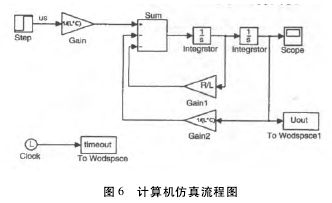
建立起系统模型之后,还要进行参数设置,打开Simulation( 仿真分析) 菜单,利用其中的 Parameters 选项来设置仿真控制参数:
To Workspace 模块: 位于 Sinks 模块库中,向工作空间输出 timeout 时间序列。设置如图 7 所示。

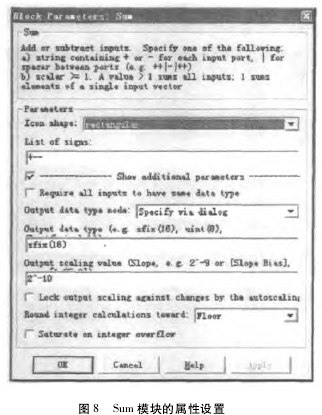
Sum 模块: 设置如图 8 所示。
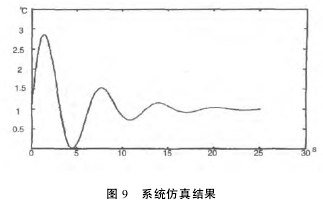
在系统仿真参数设置窗口的 Solver 标签页中将仿真结束时间改为 105。然后在 MATLAB 命令窗口给 R、L、C 赋值。赋值后进行仿真,得到太阳能热水器模糊控制器系统仿真结果,如图 9 所示。
4. 3 系统仿真结论
通过用 MATLAB 语言对系统进行仿真,比较直观、形象、准确、可靠。以上仿真结果表明,应用模糊参数自整定控制蓄水箱的温度是可行的,其参数的模糊自整定能力能抑制外界各种干扰和噪声提高控制系统的稳定性。当被控对象参数发生变化时,控制系统仍然保持较好的适应能力。
5 结束语
这里只是建立了一般的非线性系统的综合型模糊控制器,还有许多工作有待进一步完成。如模糊控制器比例因子的优化以及更好的自适应率的选择与设计等等。目前采用神经网络与模糊控制相结合的控制方式,将神经网络的记忆性融入控制方式中,这样更进一步提高系统的稳定性和抗干扰性,因此将模糊控制、神经网络与传统的控制理论相结合,发挥各自的特长,是非常具有吸引力的课题,将是进一步研究的重点。





