・上一文章:现代汽车照明及安森美半导体先进汽车照明解决方案
・下一文章:多功能出租车计价系统的研制
基于超声波微控制器技术的倒车障碍检测系统设计方案#e#基于超声波微控制器技术的倒车障碍检测系统设计方案
图3为汽车倒车障碍检测系统设计方案框图,
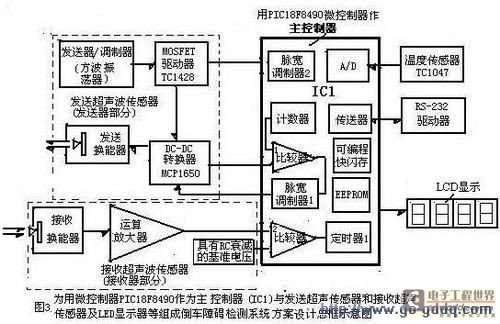
设计方案包括:IC1主控器-为用MicroChip的 PIC l8F8490微控制器作为汽车倒车障碍检测系统的主控器;发送部份(即发送超声波传感器)与接收部份(即接收超声波传感器);温度传感器(TC1047A)、通信接口RS-232驱动器以及与LCD或LED显示器等外围电路组成。
用微控制器作为检测系统的主控器
微控制器是倒车检测系统的核心。而Microchip的PIC l8F8490微控制器它非常适合于汽车车身控制这类应用。因它是一种有片上LCD驱动控制模块功能的闪存、电源管理的单片机,即运行速率为10MIPS-10百万指令每秒(MIPS),16KB闪存存储器、768字节RAM,具有一个LCD控制器、两个PWM、两个比较器和四个定时器,见图3中间IC1所示。因此它是倒车检测超声波传感器应用的高集成解决方案的主控部分。该微控制器采用纳瓦技术,实现电源管理功能,可以显著提高功效和系统可靠性,可满足包括在休眠模式下驱动LCD显示在内的低功耗设计要求。其系列产品可针对不同的嵌入式控制应用提供高达192段LCD的驱动,备有各种封装尺寸和集成特性。
发送器部分的控制
发送器是以每秒4-5次比率,在1mS期间发送40KHz脉冲方波,为了产生发射脉冲链,可以采用一个驱动器,以驱动超声换能器,其驱动器是 Microchip的TCl428 MOSFET驱动器见图3左侧所示。因实际超声波传感器特性的标准频率均为40KHz,这样发送器发送的40KHz脉冲方波链尽管是一个通用发送频率,但并非超声频率固定不变,可以根据盲区范围及障碍物远近作出选择, 标准频率(或称中心频率)愈高测距越短,而分辩率越高,常见超波传感器标准频率有30KHz、4KHz、75KHz等.
当发送器发送第一个脉冲的上升沿时刻定时器1开始计数.由于要求脉冲链的电压振幅比系统电压(+5V)高(这是由换能器所需信号源决定的),所以这个发送器部分应含有一个升压电路。这儿采用一种简单的有效升高电压的方式,即使用Microchip的MCPl650升压 DC/DC控制器,它只需要一个电容、一个电感和两个电阻就可以轻松选择需要的输出电压。主控器 IC1中PWM1(脉宽调制器)的作用是调节升压电路的输出电压为一恒定值。
接收器部分的控制
接收器部分包括一个超声波接收换能器、放大器、滤波器和一个比较器见图3左侧下所示。接收换能器的输出是一个低振幅正弦波,其频率与发射脉冲链频率相同。为了对换能器输出的信号进行放大,可采用Microchip的MCP6293运算放大器。这个运算放大器的特点是,虽然封装较小,但却拥有10MHz的带宽和引脚可选的低功耗模式。可将输出信号传送LC带通滤波器电路(又称振幅探测电路),该带通滤波器的中心频率(标准频率)与接收器的标准频率40KHz相同.这个振幅探测电路的作用是将接收到的脉冲转换为一个平滑、完整的波形,其高频噪声被过滤掉,这样一个被探测到的信号就形成了。然后这个信号被传送到比较器与衰减电压进行比较.需要说明的是,该比较器的参考电压是一个衰减电压(由RC阻容电路产生),这样该衰减参考就会随时间不断衰减接收到的信号.直至小于一个预先设定的距离值时,则定时器1仃止计数.





