・上一文章:检修雪佛兰乐风鼓风机只有一个挡
・下一文章:分析农用车离合器从动盘盘毂有限元
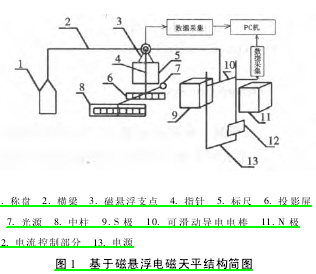
1 基于磁悬浮的电磁天平基本原理及其测量过程
基于磁悬浮的电磁天平是利用杠杆原理,把待测物的质量通过电磁力平衡原理变换为电流检测 ,利用安培力 F = BIL 当 B 与 L 确定时根据 F 与 I 的一一对应的关系,同时根据 G = F 通过 A/D 转换器就可以直接读出被测物体的重量。其结构图如图 1所示。其主要分为三个部分: 一是载重部分即称盘1; 二是平衡部分,包括横梁 2、指针 4、标尺 5、投影屏6、光源 7、中柱 8; 三是配重部分包括 S 极 9、可滑动导电电棒10、N 极11、电流控制部分12、电源13。载重部分的作用是用于放置被测物体; 平衡部分是通过光电放大系统即标尺上的零点和投影屏的零刻度线重合来判断天平是否达到平衡; 配重系统是利用通电回路中的导电电棒在磁场中受到的电磁力对被测物体进行配重,并由电流控制部分控制电流大小来调节电磁力大小,使天平平衡。
其测量过程为: 首先空载状态下接通电源,天平下端线圈中会有标准电流通过,产生电磁力,使天平处于平衡位置零点; 第二,天平托盘放上待测物时,横梁发生倾斜,则位置检测器产生不平衡信号,传给天平底部的一个内部检测电路,该电路即产生补偿电流流过线圈,并产生更大的电磁力,以维持天平的平衡直到不平衡信号消失,天平则重新处于平衡状态,这时流过线圈的电流与天平在空载平衡时流过的电流存在一个增值,这个增值与电磁力比例关系,也就与待测物重力成正比例,这样就可以得出被测物体的重量。
2 基于磁悬浮的电磁天平的设计
由图 1 可以知,基于磁悬浮的电磁天平主要分为三个部分: 载重部分、平衡部分、配重部分。
2. 1 载重部分的设计
载重部分,采取普通的单吊耳加载。
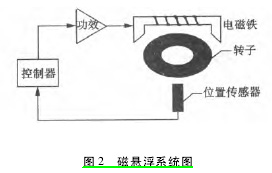
2. 2 平衡部分支点的设计
平衡部分的支点采用的是磁悬浮轴承作为支点,其系统图如图 2 所示,它是由转子、传感器、控制器和执行器四部分组成,其中执行器包括电磁铁和功率放大器两部分。采用磁悬浮做支点最大的优点就是可以减少支点与被支撑面间的摩擦,从而提高测量精度。
2. 3 电磁天平横梁部分的设计
横梁是连接载重部分与配重部分的桥梁,横梁的选择应使天平在称量的范围内满足足够的强度及其刚度,而且它本身的重量越轻越好,再者横梁的支点到两臂的长度比应选择为整数比。通过计算与校核,选取横梁的材料为 45#钢,调质处理,直径为40 mm,长度设为 200 mm,与天平两端留有较适当的距离。
2. 4 配重系统的设计
配重部分包括: 两磁极( 12 - S 极、13 - N 极) 、可滑动导电导棒( 15) 、线圈 ( 16) 、检测与放大电路和电流控制部分( 14) ; 配重部分的作用是利用电磁力矩反馈的作用来改变导电导棒在磁场中所收到的合力的大小,对被测物体进行配重,使系统平衡; 这其中桥路检测与放大电路的作用就是对电流进行检测与放大; 线圈的作用是产生电磁力; 导电导棒的作用就是切割磁场产生安培力。根据电磁力公式:
F = BLIsinθ
式中,F 为电磁力; B 为磁感应强度; L 为受力导线的长度; I 为流过导线的电流强度; θ 为通电导体与磁场的夹角。由上式可知,F 的大小与 B、L、I及 sinθ 均成正比,由于传感器设计好后,其感应线圈的规格尺寸已固定,所以其 B、L 均不再改变,而 θ为 90°,故 sinθ =1,因此,F 的大小与 I 成对应关系。





