・上一文章:IEC 61850标准中ACSI映射实现研究
・下一文章:基于微机电系统的无线鼠标方案
4 控制软件设计
控制软件包括主机软件和单片机软件,主要软件流程如图4所示。单片机1产生红外线电子移位逐行扫描电路所需的开关信号和移位时钟,并在每个移位时钟周期采集一次接收状态数据,完成一遍扫描后把数据上传给主机;还可根据主机指令,通过程序控制改变扫描速度和扫描强度。单片机2分别控制检测4个超声波装置,所计时间经简单处理后上传给主机。由于存在盲区,要避开此区间过来的虚假停止脉冲的干扰,采用延时开中断,即在起始脉冲启动计时器计时后,等待盲区过去再开中断,使单片机中断口接收到实际有效停止脉冲停止计时器计时。主机程序以主动查询方式轮流从两个单片机读取纵向检测数据和横向检测数据,然后依照一定算法,对检测数据进行处理、分析,先判断是否有车,有车时判断车型、计算停车位置参数和车箱几何参数。
主机软件采用Delphi编写,能进行测量参数显示和工作参数设置。
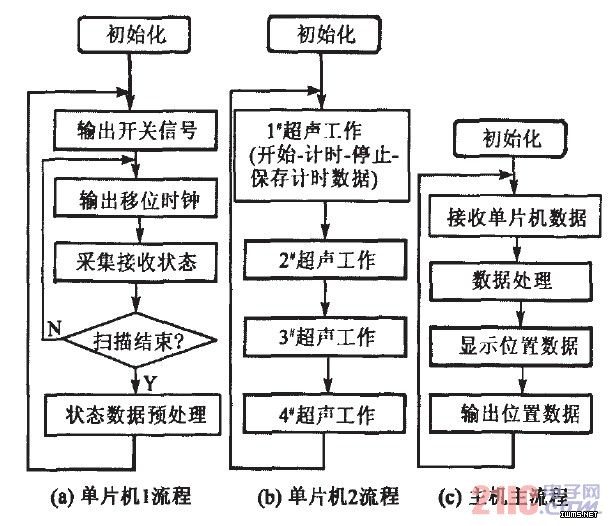
图4 主要软件流程
5 测试与结果
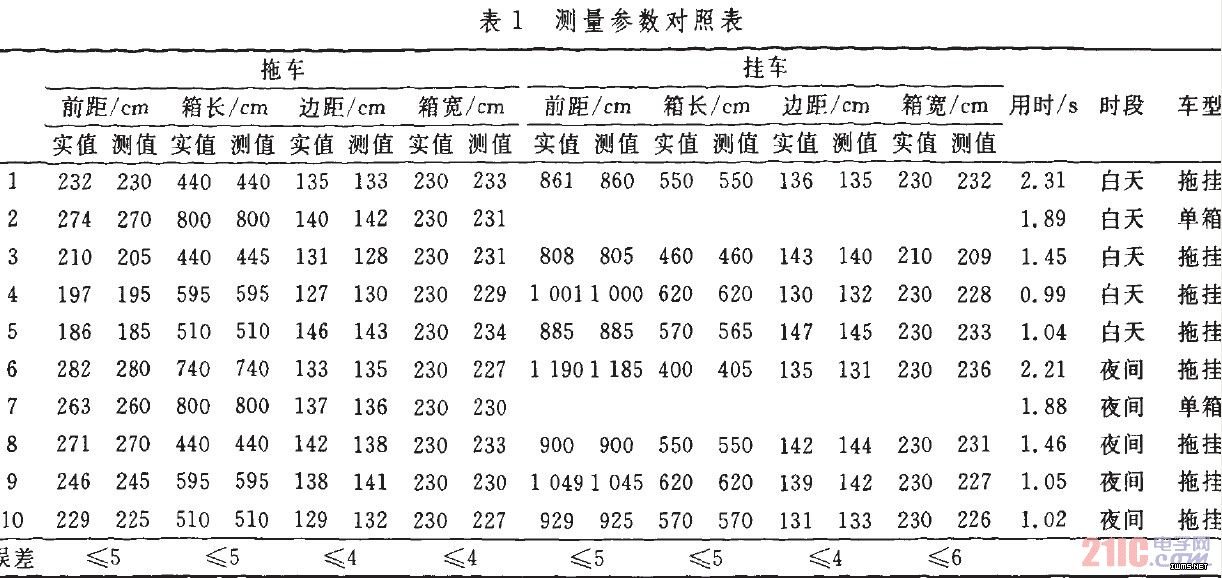
测试在室外工业现场进行。工作区为5 m×21 ITI,红外模块的间距为5 cm,红外收发阵列的模块数均为425。连续对100辆汽车进行定位,包括多种车型,都定位成功。在白天和夜间各抽取5辆汽车的定位数据与实物数据进行现场比对,结果如表1所示。车箱长度和前距测量误差不超过5 cm,车箱宽度和边距测量误差不超过6 cln,单次定位时间最快可达1 s内。
6 结语
结果表明,采用声光探测技术可实现平面内物体的非接触定位。基于声光探测的汽车定位系统,不论是定位速度、定位精度还是定位可靠性,都较当前的其他定位方式有明显的提高。目前该系统已被用于汽车物料自动取样控制系统中,在多个钢铁电力企业得到应用,运行效果良好。
汽车定位系统用于检测汽车停车位置参数和车箱几何参数,为机械手在车箱范围内作业提供平面坐标数据,是车载货物自动作业控制系统的组成部分。目前的汽车定位系统多用齿轮传动的机械移位红外线扫描方式或基于视频图像的人工画界方式,前者定位速度慢,后者定位精度低,可靠性差,都难以满足实际定位对速度、精度和可靠性的要求。文中采用红外线电子移位逐行高速扫描技术和超声波测距技术实现汽车定位,具有可调定位速度和适应恶劣天气的能力,还采用多种措施,提高系统的抗干扰能力和可维护性能,实现了快速、高精度、高可靠定位的目标。利用Delphi开发主控软件,实现数据处理,完成定位结果的显示、输出,工作参数设置和状态检测,具有良好的开放性,方便与各种控制系统接口。
1 工作原理和系统组成
1.1 工作原理
以透射式红外光电传感器和超声波测距装置相结合可实现对平面区域内物体的定位。透射式红外光电传感器由红外发射模块和红外接收模块组成,当收发模块之间有物体遮挡光路时,将改变接收模块的接收状态,据此可非接触探测物体是否存在。
如果把多个发射模块和多个接收模块按固定间隔平行排列成两排,让收发两侧对应位置上的红外模块一对一对地按顺序轮流接通工作,对其间区域进行逐行扫描探测,则依据扫描结果不但可判断该区域是否有物体存在,还可计算出物体的长度及其在该区域中的纵向相对位置。
超声波测距通常采用渡越时间法,收发头与被测物体之间的距离:

式中,v为超声波在介质中的传播速度;t为超声波的往返时间间隔。分别在物体两侧标定位置安装超声波测距装置,测出与物体的距离,就可计算出物体的宽度及其在该区域中的横向相对位置。
1.2 系统组成
图1为基于声光探测的汽车定位系统的组成。
图中单片机1、红外发射阵列、红外接收阵列和电子移位电路构成红外线电子移位逐行扫描电路,用于车箱长度和纵向停车位置的测量。单片机2和4个超声波测距装置构成的测距系统,用于车箱宽度和横向停车位置的测量。
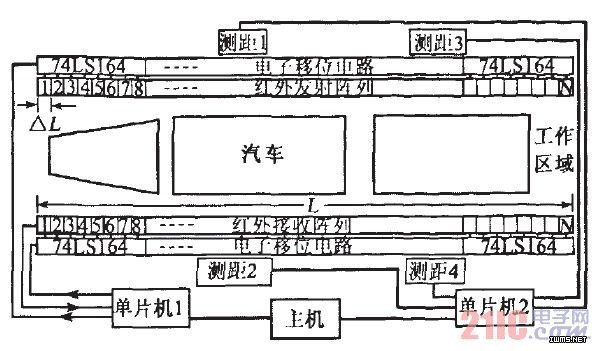
图1 系统组成
其中红外发射阵列和红外接收阵列安装于工作区域两侧车箱中部的高度,分别由N个发射模块和N个接收模块组成,它们均匀平行排列,收发一一对应。4个超声波测距装置安装在工作区域两侧,分成两组,分别测量前部车箱和后部车箱。
主机对纵向检测和横向检测的数据进行综合处理和分析,判断出工作区是否有车、哪种车型,并计算出汽车在区域中的停车位置参数和车箱几何参数。





