・上一文章:基于声光探测的汽车定位系统
・下一文章:浅谈发电厂实行DCS控制系统解决方案
2.2 发射端
加速度传感器采集加速度信号,单片机通过软件实现对加速度信号的二重积分而转换为位移信号,经编码处理至蓝牙发射芯片,通过天线将数据发射出去。
2.2.1 加速度传感器电路
采用ADI的低成本、低功耗双轴单片加速度传感器 ,其可测量加速度范围至少在 ±2g 以上 ,可以测量动态加速度(比如振动)和静态加速度(比如重力加速度),其输出的占空比是和加速度的大小成一定的线性关系,并且可以直接被单片机(MCU)采样而不需模数转换(ADC)。工作周期则可以简单地通过RSET来调节 ,范围在0. 5m s到10m s之间。带宽可以通过调节XFLT和管脚上的电容Cx和Cy来确定, 本方案中选用Cx=Cy= 0.10μF, 故 ,需要注意的是,加速度传感器在平动时会在相应的方向产生与加速度相关的输出,在转动的时候也是如此 ,本方案中我们假设鼠标在水平面使用 ,因此我们只需要一片加速度传感器就可以解决问题 ,加速度的大小可以通过 T1/ T2 = 11% 3A+ 50%这个线性比例关系获得 其中 T1表示工作周期中高电平部分的长度 , T2表示整个工作周期的长度 , T1/ T2就是输出占空比的大小,A 是加速度大小 ,而加速度的方向可以通过其正负性来判定。
,需要注意的是,加速度传感器在平动时会在相应的方向产生与加速度相关的输出,在转动的时候也是如此 ,本方案中我们假设鼠标在水平面使用 ,因此我们只需要一片加速度传感器就可以解决问题 ,加速度的大小可以通过 T1/ T2 = 11% 3A+ 50%这个线性比例关系获得 其中 T1表示工作周期中高电平部分的长度 , T2表示整个工作周期的长度 , T1/ T2就是输出占空比的大小,A 是加速度大小 ,而加速度的方向可以通过其正负性来判定。
2.2.2 占空比输出解码
对于每一个轴,传感器的输出电路把模拟信号转变成占空比调制的数字信号,这样就可以通过MCU 的定时/计数器解码获得加速度信息,其大小可以通过下式计算得到:

由于每个器件存在差异,其 0g输出和灵敏性会因为温度、噪声等原因而不同,为实现高精度测量,0g的偏移量和比例因子必须按照实际测量所得。本方案在TA=25℃,VDD=3V,RSET=125KΩ,中测得:

为了实现高精度测量,考虑到T2易受温度漂移的影响,必须周期性地更新T2的平均值。一种新的改进型脉宽调制(PWM)解码方法是通过占空比调制在X轴和Y轴使用相同的三角形参考波 ,使得每个周期中 T1的中点达到同步 ,这种方法能加快数据传输时间,也称之为高速解码,X轴和Y轴的占空比输出如图2所示。
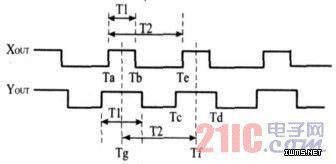
图2 X轴和Y轴的占空比输出
单片机软件编程实现获取加速度信息的流程图如图3所示。
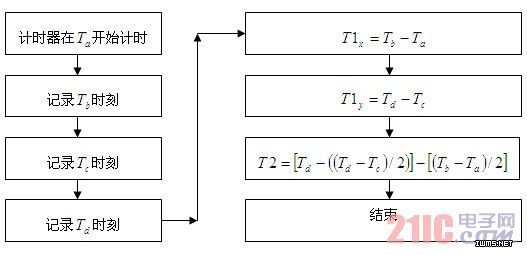
图3 ADXL202E高速解码技术流程图
2.2.3 软件实现获取位移信号
如何实现高精确度且易于编程的二重积分算法是把加速度信号转换为位移信号的关键所在,用积分电路来实现二重积分的误差较大,因此拟用软件编程来实现二重积分的算法 ,并且先在 matlab环境下用动态系统的simulink模型模拟 FFT、辛普生公式等不同的积分算法 ,来进行算法的比较与选择 ,通过加速度传感器鼠标的 simulink模型对实际位移和软件实现的位移信号进行比较,误差控制在在0.5%以内,满足鼠标设计要求。





