・上一文章:基于单片机的轴类零件温度测量系统设计
・下一文章:电子负载在开关电源测试中的应用
在对跟踪控制问题的研究过程中,为了改进智能体模型或者控制器性能,需要详细观察智能体某个阶段的运动轨迹形态。为了达到此要求,设计开发过程控制模块,实现对仿真过程的实时控制。该模块主要设计了两种键盘控制功能,即速度调整和视点调整。
速度调整是在创建系统形体的间隙设置额外的延迟时间来调控仿真速度。设计在f1~f6按键响应程序中分别设置六个档次的速度。
视点调整是设计用几何变换法来改变视点的位置。该方法的设计原理如图7所示。
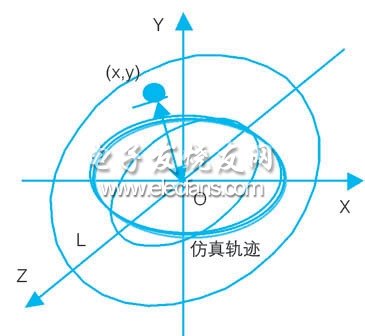
图7 几何变换设计原理图
图7中,o为轨迹中心;ρ为由o指向视点的矢量;视点坐标(x,y)为矢量ρ分别在x轴和y轴上的投影值;圆环面l为xoy平面上的视点调整区域,由ρ的模最大值和最小值来界定;上、下方向键分别用于调整ρ变大、变小;左、右方向键用于调整视点在l内以o为圆心ρ为半径的圆环上分别向左、向右移动。基于该几何变换法的设计,在仿真运行过程中,通过控制模块向软件发出指令,就能够实现视点360°全方位移动和观察距离的调整。图8为经过视点调整后看到的仿真图像。

图8 轨迹交接放大图
从图8中能够观察到各条跟踪轨迹接近目标轨迹前的形态以及接近的位置,进而判断各系统模型或跟踪控制器的优劣,为改进它们的参数提供了实验依据。
5 结束语
本文根据智能跟踪控制系统研究的需要,开发出三维动画仿真软件。该软件具有以下突出优点:采用数据导入的思想,使软件摆脱数据来源复杂的限制,拓宽了该仿真软件的使用范围;设计视点几何变换法等,实现仿真过程的实时可操作特性,从而提高了其作为仿真研究的价值;采用模块化设计,结构紧凑合理,可重用性和扩展性较强。





