式中,di为田块内第i个测点距离拟合平面的垂直距离,cm;d为所有测点距离拟合平面垂直距离的平均值,cm;n为田块内所有测点的数量。当P值越小时,说明田面起伏越小,田面越平整。P=0是理论上可达到的最佳精度,而较高的P值则意味着较差的土地平整精度。在美国,常规平地方法和激光平地技术所能达到的田面最小P值分别为2~2.5 cm和小于1.2 cm,在葡萄牙则是3~4 cm和小于1.7cm。
标准偏差P反映了田面平整的总体状况,要想评价田间地面形状的分布差异及特征,可利用分布偏差计算给出定量描述。首先计算田块内各测点到拟合平面的垂直距离di(cm),再根据小于某一数值(如3 cm)的测点的累积百分比数来反映地面平整度的分布状况。以美国土地利用局规定的标准为例,激光平地后,田块内偏差值小于1.5 cm的测点的累积百分数最大可达80%以上。
1.2 GPS面积测量仪原理
GPS面积测量仪采用GPS全球卫星定位系统能够提供实时的经度、纬度、高程等导航和定位信息,利用GPS的定位功能,得出各个点的坐标,再通过数学方法计算出距离、面积等数据。由于地球是一个椭球,为了精确计算距离或面积,一般采用投影的方式转换成平面坐标。在我国,对于大比例尺的地图通常采用高斯一克吕格投影进行转换,然而投影法计算十分复杂,难以在单片机中实现。为了简化计算,将地球视为正球体。取地球半径为6 371 116 m,则可转换成平面坐标:

式中:R为地球半径,x为经度,m;y为纬度,m。则在地球表面Y经度处,经度差、纬度差各为一度的方格面积为:

2 农田农情监控仪设计
农业具有地域分散、对象多样、环境因子不确定等特点。传统农业生产主要依靠人的经验进行,无法对农业的生产全程进行实时精准监控,实现最优化的生产。快速、有效采集和描述影响作物生长环境的空间变量信息,是实践“精细农业”的重要基础。因此进行农田环境监控、随时掌握农业环境因素变化,从而采取相应的最优对策显得十分重要。
传统的农田信息监测主要靠农业技术人员实地现场采集数据、A/D转换、通过PC保存分析数据,或者通过数传电台的方式进行数据传输。这些方式存在很多问题:由于农业环境相对恶劣,严寒、高温、高湿等气候因素很容易导致PC无法正常工作:PC机因其体积较大、费用较高、功耗显著造成性能价格比低;无法实现远程监测,即便使用数传电台,也会受到地形的限制,距离仅限于几十公里之内;无法进行24小时实时监测。因此,农业环境的远程实时监控问题亟待解决。
目前国内外的研究大多采用单片机作为微控制器,由于其自身性能的局限性,使得系统功能扩展时出现一系列不可预知的调试问题。在数据传输部分有的采用CDMA模块,但成本太高,不宜推广。
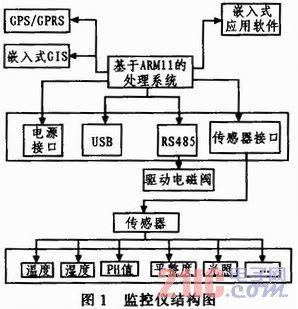
本设计提出了基于ARM、WiFi、蓝牙的嵌入式农田环境信息采集发送系统设计方案,降低功耗和成本,可靠性强,易于升级。可采集的农田数据有:包括土壤墒情、盐碱度、养分、土壤平整度、农田长势图片、主要虫害状况,气象信息,种植面积,种植品种,灌溉状况,施肥情况,测土情况等。
上一页 [1] [2] [3] 下一页





