・上一文章:FPGA实现OFDM水声通信系统定时同步
・下一文章:基于ARM和Linux的嵌入式平台的构建
该调制器采用充电电感,属于直流谐振充电,其自然谐振周期为:
![]()
其中:C0是仿真线的静电容
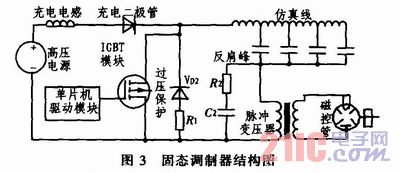
Tch等于调制器脉冲重复周期T0两倍,即调制器的脉冲重复频率是固定的。因此为了适应雷达工作于多种重复频率的要求,可在充电电路中串入一只二极管,称为充电二极管或保持二极管。这时只要充电电路的Tch值小于最小的脉冲重复周期就行了。
VD2和R1称为过电压保护电路,它的作用是防止仿真线上出现过高的电压而损坏功率管。当仿真线向接近短路的负载放电时,其上的电压会变成负极性,由于功率管不能反向导电,这个负极性的电压不会消失,在下一个脉冲重复周期充电时,这个电压与电源电压的极性一致,所以仿真线将会充电到一个较高的电压值。如果这时负载打火并未消失,那么这一过程将会继续下去。在理论上可以证明,仿真线上的电压将会达到电源电压的6倍之多。当电路中接入VD2和R1之后,只要仿真线上出现负极性电压,就可以通过VD2放掉,从而防止了仿真线上过电压的产生。
R2C2称为反肩峰电路。当仿真线向不匹配的负载放电会在脉冲的前沿引起显著的肩峰。R2C2电路就是为了减小这种肩峰的,其电阻通常选择和负载阻抗相等,而电容的大小可按电路时间常数与脉冲前沿时间大致相当来确定。
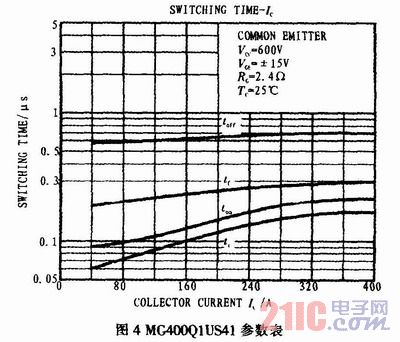
功率开关管IGBT采用高速型MG400Q1US41,其参数为1 200V/400A,价格为1 080元,其参数如图4所示。工程中采用十管串联的方法以适应高电压的要求。驱动模块采用M57962L,其参数为1 200 V/400 A,价格为72元。
十管串联需要保证串联的10个管子同时导通、同时截止,否则先导通或者后截止的管子就因为要承受高电压而击穿,进一步击穿所有的管子,而形成调制器故障,造成不必要的损失。解决的办法是用单片机产生一路触发脉冲,同时触发驱动模块。因为驱动模块具有较高的输入阻抗,因此单片机的输出电流足够同时触发驱动模块。10个驱动模块被同时触发,因其延迟的一致性,会使单片机的触发脉冲同时加到10个IGBT的栅极。





