・上一文章:基于嵌入式技术的汽车安全防御系统设计
・下一文章:基于ARM处理器S3C2440的无线监控系统设计
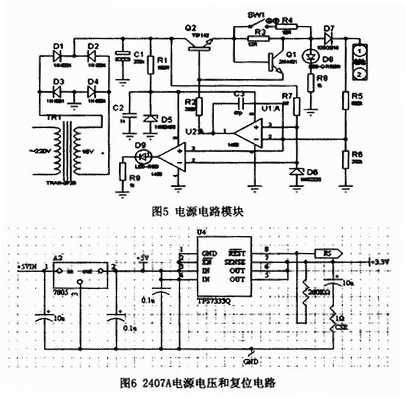
电源模块可由16V交流电压充电器通过电源充电电路为6节车载镍镉电池(约7.2V)充电,为各模块提供工作电压。电源电路模块如图5所示。由于各模块所需工作电压不同,可先通过使用78(L)05稳压器得到5V直流电压,2407A所需3.3V电源由带集成延时复位功能的低压差稳压器TPS733Q实现,同时具有复位功能。如图5所示。
2.6 电机驱动模块设计
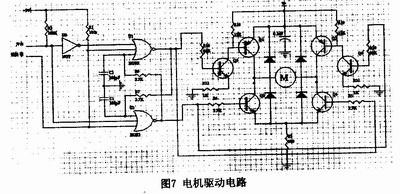
本轮式机器人平台采用左、右直流电机驱动的方式,中间有一起支撑作用的万向轮。电机驱动模块可以实现两电机在任何方向旋转从而达到小车前进、倒退和转向的目的。电机发生转向与否是由提供给电机驱动电路的高、低电压信号次序决定的,它们来自前端的数字逻辑门定序电路。数字逻辑定序电路的输入信号由2407A 产生的方向信号和PWM信号实现机器人的方向和速度的控制分为方向端和使能端,该电路同时可以避免产生电源短路对电子器件造成的损害。此小车电机驱动电路是H桥驱动电路,该电路通过控制电机电流流向达到控制转向的目的。当Q1和04导通时,电机电流从左流向右,电机正转;当Q2和Q3导通时,电机电流从右流向左,电机反转。如图7所示。
3 系统整体实现
以TMS320LF2407A为核心的教育机器人硬件系统整体功能可在软件开发工具CCS和硬件开发工具XDS的支持下采用C语言和汇编语言混合编程进行程序仿真调试,再通过JTAG接口下载到DSP内实现,给DSP学习者带来了极大的方便。同时,得益于2407A外部资源的丰富性,系统中未使用部分有利于学习者做进一步的功能开发和应用。
4 结语
该整体硬件系统结构简单,具有很好的扩展性,而且通过软件编程控制机器人完成一定的功能,很好地锻炼了学生的逻辑思维能力和编程能力,有助于培养学生的实践能力和创新精神。





