・上一文章:基于FPGA的系统易测试性的研究
・下一文章:基于89C2051的多功能交流稳压电源设计
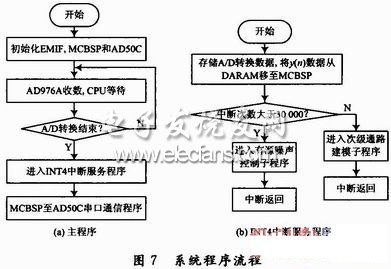
本系统软件主要包括三个部分:系统底层通信程序、次级通路建模子程序和有源噪声控制子程序。底层通信程序包括两路传感器信号同步采集程序和计算得到的反噪声信号输出程序。系统程序流程如图7所示。传感器采集信号的存储、反噪声信号的发送以及自适应滤波算法运算都在INT4中断服务程序中进行。经过实验,发现次级通路建模自适应滤波器在迭代30 000次后,即可进入稳定状态,故设置前30 000次中断用于次级通路建模,待次级通路LMS滤波器稳定后即将其系数固定不变,之后的中断服务程序都进入有源噪声控制子程序,进行FX-LMS滤波器系数的迭代,并产生反噪声信号y(n)。
4 实验结果
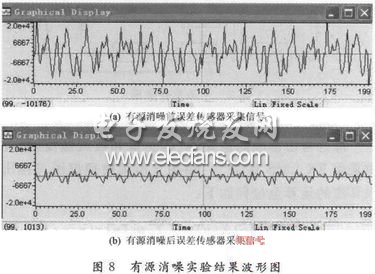
实验采用800 Hz单频正弦信号作为待消除的噪声信号。根据反复试验所得经验值,次级通路滤波器阶数取32,步长取0.125;有源消噪滤波器阶数取64,步长取0.005。最终实验结果如图8所示。由波形图可以看出,有源消噪系统运行后,误差传感器接收的信号幅度明显降低,系统取得了良好的降噪效果。通过计算可知该系统对800 Hz单频噪声的幅度可降低9 dB。实验时,人耳在误差传感器处进行监听,能够明显感受到噪声的抑制效果。当初级声源噪声特性发生改变时,系统能够实时地做出响应,并具有良好的稳定性。
5 结语
本文设计并实现了一个有源噪声控制系统,下一步的研究工作是在该硬件系统中编程实现各种不同的自适应控制算法,通过实验来比较各种算法的性能,并力争将有源消噪由低频扩展到高频,由窄带扩展到宽带,以推进有源噪声控制的实际工程应用。





