・上一文章:LED路灯节能监控系统的设计
・下一文章:低成本交直流两用后备电源的设计
LIN从机节点的职能可概括为帧头检测与接收和帧处理这两部分。在每个报文帧的帧头中由配置晶体振荡器的主机节点通过同步场给从机节点提供波特率基准,从机节点通过测量同步场来校准自身波特率,以保证在报文传输中各节点之间的同步。
同步场逻辑值为0x55,波形如图4所示。从机节点通过测量同步场中第1和第5个下降沿之间的时间间隔来计算校准自身波特率。
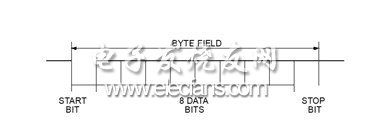
图4 同步场波形图
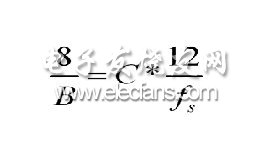
设主机节点和从机节点的串行口均工作于方式1(8位UART,波特率可变),主机节点波特率为B,从机节点以定时器测量同步场第1和第5个下降沿得到的计数个数为C,从机节点振荡器当前频率为fs,得到式(1)。
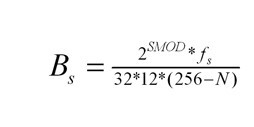
设从机节点计数器1作为波特率发生器工作于常数自动重新装入的8位定时器/计数器方式,得到式(2)。
使从机节点与主机节点同步,则令:
Bs=B
由式(1)~式(3)可得到式(4)。
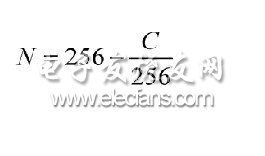
从机节点以由式(4)计算得到的N值作计数器1产生波特率的重新装入值,可产生与主机节点一致的波特率。
节点制作与实验
利用该设计制作LIN节点构建LIN网络,对其进行了通信试验和初步的抗干扰试验。由于报文帧头和报文帧响应均由主机节点发送,报文帧帧头和报文帧响应间的帧间响应间隔较小。
当LIN从机节点在LIN主机节点的引导下相互传送指令或信息时,LIN网络上进行从机节点到从机节点的数据传输,此时LIN主机节点发送报文帧帧头,一个LIN从机节点发送报文帧响应,另一个或几个LIN从机节点接收报文帧响应。由于这种报文帧传送需要3个甚至3个以上节点参与,故预留了较长的帧间间隔,以便报文帧响应的发送节点和接收节点有充足的响应时间,确保报文帧传送的顺利完成。
当LIN主机节点向某从机节点请求数据时,LIN总线上进行从机节点到主机节点的数据传输,此时LIN主机节点发送报文帧头, LIN从机节点接收报文帧帧头后发送报文帧响应, LIN主机节点接收报文帧响应。
汽车电磁环境恶劣,因此汽车通信系统的抗干扰能力尤为重要,按该设计制作的LIN网络在BZ-5型汽车电火花干扰试验台上进行了抗干扰实验,试验中网络通信顺利,各项功能正常。
结束语
对总线式车身控制系统中的CAN/LIN混合网络进行深入研究,给出车身混合网络结构中主控节点设计与实现。在车身控制系统中,将LIN总线连入低速车身系统中,通过主控节点将CAN总线和LIN总线构建成混合控制网络,使其控制系统兼具可靠性、高性能和低成本优点。在器件选型上采用FREESCALE典型汽车电子芯片和智能触点检测模块,既实现了可靠网络控制功能,同时也降低汽车的开发、生产成本,具有较高实用性。





