・上一文章:高频率、高输入DC/DC转换器设计实例
・下一文章:基于脉冲序列控制技术的降压型开关电源
使用PID算法,将实际与期望输出电压之间的误差进行比例、积分和微分计算,然后将这三项合起来,实现对PWM占空比的控制。PID算法可以用于采用电压和电流模式的控制环路。处理MICroChip的DSC不需要DSP技巧(见图5的代码列表),控制软件(图4)的主要“核心”是PID环路。PID软件通常很小,但是其执行速度非常快,通常每秒可以反复几十万次。这么高的反复率需要PID软件程序尽可能有效地发挥最佳性能。使用汇编程序是保证“严紧代码”的一种很好的方法。
PID控制环路是定期由ADC进行中断驱动,任何系统功能都能在“空闲环路”中执行,以便减少PID控制软件内不必要的工作量。诸如电压上升/下降、错误检测、前馈计算和通信支持程序功能都是空闲环路可以执行的,其他中断驱动进程的优先级都必须比PID环路低。
空闲环路在完成系统和外设的初始化任务之后启动。通常,空闲环路监控温度,计算“前馈”条件,并检查故障状况。SMPS软件可执行该控制算法,将ADC中断驱动的PID环路作为其与时间关系最密切的部分。PID软件不应该使用超过可用处理器大约66%的带宽,以便计算资源的其余部分能够分配给空闲环路软件。
假设以30 MIPS运行PID环路(包括30条指令),执行时间大约为1μs。如果反复率是500 kHz(2μs),那么PID工作量需要消耗一半可用的处理器带宽,也就是15 MIPS。
用于数字式降压式转换器的PID软件的实例代码列表:
CALCULATE_PID:
push.s ; Save SR and W0-W3
bclr.b IFS0+1, #3 ; Clr IRQ flag in interrupt controller
#PID_REG_BASE, w8 ; Init pointer to PID register bLOCk
mov #PID_GAIN_REG_BASE, w10 ; Init pointer to PID gain register block
mov ADBUF1, w0 ; Read ADC to get voltage measurement
mov COMMANDED_VOLTAGE, w1 ; Get commanded output voltage
sub w1, w0, w0 ; W0 = proportional voltage error
mov PROPORTIONAL_Error, w1 ; Get previous voltage error
sub w0, w1, w2 ; diff error = new verr - old verr
mov w0, PROPORTIONAL_ERROR ; Store New Proportional Voltage Error
mov w0, PREINTEGRAL_TERM ; Store copy PERR as pre integral term
mov w2, DERIVATIVE_ERROR ; Store new Derivative Error
; These registers are reserved for PID calculations
; w6, w7 = contains data for MAC operations
; w8, w10 = pointers to error terms, and gain coefficients
SUM_PID_TERMS:
clr A, [w8]+=2, w6, [w10]+=2, w7 ; clr A, prefetch w6, w7
mac w6*w7, A, [w8]+=2, w6, [w10]+=2, w7 ; MAC proportional term and gain
mac w6*w7, A, [w8]+=2, w6, [w10]+=2, w7 ; MAC derivative term and gain
mac w6*w7, B, [w8]+=2, w6, [w10]+=2, w7 ; Update Integrator
add ACCA ; Add ACCB (Integrator) to ACCA
sftac A, -#8 ; scale accumulator (shift)
mov ACCAH,w0 ; Read MSW of acca (result)
btst ACCAU,#7 ; Check sign bit of ACCA
bra z, Output_PWM ; Branch if acca PWM value is positive
clr w0 ; Clear negative PWM values
OUTPUT_PWM:
mov w0, DC1 ; Output new duty cycle value
pop.s ; Restore SR, w0-w3
retfie ; Return from Interrupt
评估板有助于设计人员测试和修改SMPS控制软件,并理解SMPS的设计原理。在这种情况下,您可以考虑使用Microchip的dsPICDEM SMPS降压型开发板--卓越的低功耗DC/DC降压式转换器来评估DSC器件和控制软件。该板可通过标准AC/DC 9V,0.75A电源获得其输入电源。板上有两个独立的降压式转换器,演示软件设置可提供高达+5V和+3.3V的输出。
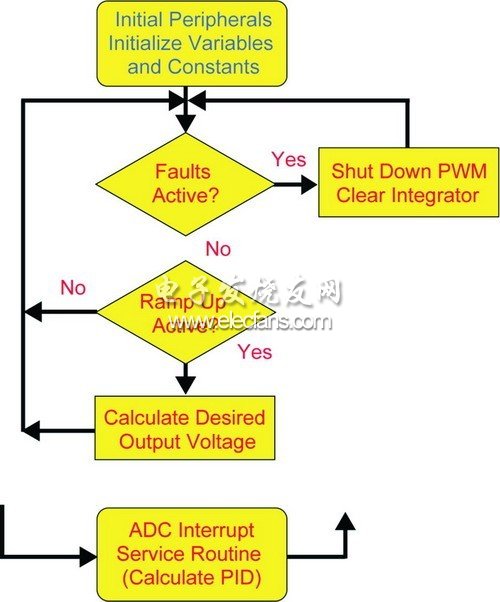
图4 控制软件的结构
这个开发板的输入电压范围为8-14V DC。每个输出负载应该限制在0.75A,而输入电源可以通过同轴输入电源连接器J2或测试夹连接P1和P2提供。该板也可为+5V输出提供一个动态负载。这个负载是通过1 kHz方波信号驱动的,该信号是由输出比较模块产生的。板上动态负载使用一个FET将电阻器负载连接到转换器对地输出,实现转换器激励,以便可以测量转换器的动态行为。动态负载的使用可通过跳线模块和/或软件由用户自行选择。
用户可以选择通过跳线设置,像标准降压式转换器或同步降压式转换器那样运行开发板。所提供的软件能够以电压控制模式运行该板,也可以进行电流监控。该板也可通过转换器输出端的一个检测电阻器测量电流,而电压则被放大并送到dsPIC30F2020器件的ADC输入端。该板还可提供通过ADC输入可读取的三个备用可变电阻器。这些“电位器”可用于在原型设计中的模拟所需的信号。
8 结语
通过专用于数字回路控制的新款DSC,电源设计人员可以容易地在他们的设计中加入新的功能和能力。要做到这一点,无需学习复杂的数字信号处理器(DSP)处理技巧,使用熟悉的模拟元件和软件,设计人员就能够迅速而经济地使用DSC开发具有更高智能的电源。





