・上一文章:传感器网络中的能耗问题研究
・下一文章:基于Linux内核的透明代理配置方案
Ptl00温度传感器为正温度系数热敏电阻传感器,具有抗振动、稳定性好、准确度高、耐高压等优点。铂热电阻的线性较好,在0到100℃之间变化时,最大非线性偏差小于0.5℃。铂热电阻阻值与温度关系为:
式中,A=0.00390802;B=-0.000000580;其阻值表达式可近似简化为:Rpt00=100×(1+At),当温度变化 1℃,Ptl00阻值近似变化0.39 Ω。
2.5 WDK505测液位模块
采用WDK505压力变送器测量液位。该仪器具有防结露、防雷击设计,抗干扰能力强,长期稳定性好等优点。芯片置于全不锈钢壳体内坚固密封,可靠性好,精度高。
3 软件设计
此系统的主要任务是对C8051F040芯片的初始化和各种参数的设置和通信,并显示。重点是超调量控制、温度控制PID实现以及上位机软件的编写。
3.1 超调量控制
实验表明,水温控制系统中,采用一般的控制始终具有较大的超调,只能靠自然冷却,这就使得调节时间大大延长。因此,在水温控制系统中要缩短调节时间,就必须做到基本无超调。通过反复实验,采用在程序中加入PID算法以及模糊控制方法进行温度控制。实践证明,这种控制方式可以加快系统阶跃响应,减小超调量,并且具有较高的温度控制精度。
3.2 上位机软件
上位机软件利用VC++编写,可以设置2个通道的上、下限温度和液位,以及温度和液位的实时显示和温度随时间变化曲线。上位机软件可以打印温度曲线,可以全图打印,也可以局部打印,还可以随时查看历史数据。其界面如图3所示。
3.3 温度控制PID实现
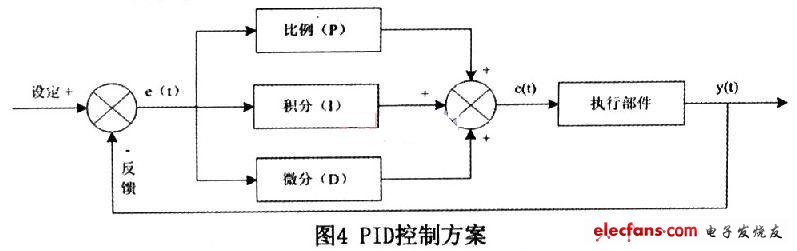
PID控制是控制工程中技术成熟、应用广泛的一种控制策略,经过长期的工程实践,已形成了一套完整的控制方法和典型的结构。PID的工作基理是:由于来自外界的各种扰动不断产生,要想达到现场控制对象值保持恒定的目的,控制作用就必须不断地进行。若扰动出现使得现场控制对象值发生变化,现场检测元件就会将这种变化采集后经变送器送至PID控制器的输入端,并与其给定值进行比较得到偏差值,调节器按此偏差并以我们预先设定的整定参数控制规律发出控制信号,去改变调节器的开度,使之增加或减少,从而使现场控制对象值发生改变,并趋向于给定值,从而达到控制目的。其实PID的实质就是对偏差进行比例、积分、微分运算,根据运算结果控制执行部件的过程。控制方案如图4所示。
PID控制器的控制规律可以描述为:

本设计利用了上面所介绍的位置式PID算法,将温度传感器采样输入作为当前输入,然后与设定值进行相减得偏差,再对偏差值进行PID运算产生输出结果,最后控制定时器的时间进而控制加热器。
4 结束语
温度遥控遥测是工业上使用比较多的一种控制技术,本文就是针对温度遥控遥测所进行的探讨与实践。设计采用PID控制算法大大减少超调量,提高控制精度。由于传感器和其它器件本身并非理想线性,程序中对实测数据进行了线性补偿。经过大量的实验,观测数据,优化系统,最终得到的实验结果精度较高。水温控制准确,双向通信良好,上位机界面完整、优美。希望本文提出的方案能对大家在温度遥控遥测的设计与应用方面有所帮助和启示。





