・上一文章:TRIAC调光器(正向相位控制调光器) 的工作原理
・下一文章:灵通LT3800F卫星接收机,因雷击而损坏
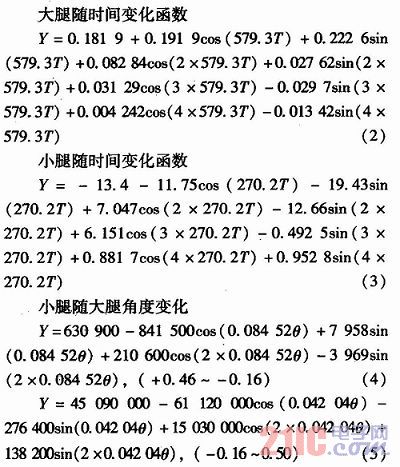

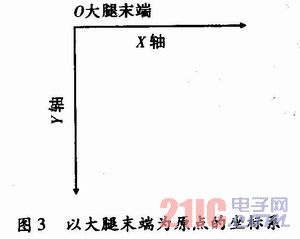
式中,θ为大腿与竖直方向的夹角;α为模型控制计算出的小腿与竖直方向的夹角;A为大腿长度;B为小腿长度;(X,Y)为以大腿末端作为坐标原点的标系中的位置。
通过踝关节坐标变换建立的模型在仿真中可以观察到大腿的运动状态对小腿的姿态进行控制。为验证模型的正确性,采用单片机控制步进电机运动的方式在机器人关节上设计一个模仿大腿摆动过程的程序模拟大腿摆动,通过固定在机器人大腿上的倾角传感器来检测模拟大腿的角度变化,通过STC89C52单片机根据已建立的大小腿运动函数关系控制安装在机器人膝关节上的舵机,驱动小腿摆动。观察结果表明,在一定精度范围内模拟小腿的运动姿态,符合人腿的运动模式,说明通过人腿模型采集系统建立的运动模型是可行的,该肢体模型函数能够应用于假肢的设计中。
5 结束语
基于视频采集系统的肢体建模实现了—种精准度高,误差较小的建立肢体运动模型的方法,为研究肢体运动提供了方向,也为实现低成本假肢的设计打下基础。





