・上一文章:气液密闭循环中药熏洗仪设计
・下一文章:SPE61A单片机的非接触式高压验电器的开发
本设计以AT89C51单片机为核心,以4*4矩阵键盘做为输入达到控制直流电机的启停、速度和方向,完成了基本要求和发挥部分的要求。在设计中,采用了PWM技术对电机进行控制,通过对占空比的计算达到精确调速的目的。
一、 设计方案比较与分析:
1、电机调速控制模块:
方案一:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。更主要的问题在于一般电动机的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。
方案二:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整。这个方案的优点是电路较为简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命较短、可靠性不高。
方案三:采用由达林顿管组成的H型PWM电路。用单片机控制达林顿管使之工作在占空比可调的开关状态,精确调整电动机转速。这种电路由于工作在管子的饱和截止模式下,效率非常高;H型电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也极佳,是一种广泛采用的PWM调速技术。
兼于方案三调速特性优良、调整平滑、调速范围广、过载能力大,因此本设计采用方案三。
2、PWM调速工作方式:
方案一:双极性工作制。双极性工作制是在一个脉冲周期内,单片机两控制口各输出一个控制信号,两信号高低电平相反,两信号的高电平时差决定电动机的转向和转速。
方案二:单极性工作制。单极性工作制是单片机控制口一端置低电平,另一端输出PWM信号,两口的输出切换和对PWM的占空比调节决定电动机的转向和转速。
由于单极性工作制电压波开中的交流成分比双极性工作制的小,其电流的最大波动也比双极性工作制的小,所以我们采用了单极性工作制。
3、PWM调脉宽方式:
调脉宽的方式有三种:定频调宽、定宽调频和调宽调频。我们采用了定频调宽方式,因为采用这种方式,电动机在运转时比较稳定;并且在采用单片机产生PWM脉冲的软件实现上比较方便。
4、PWM软件实现方式:
方案一:采用定时器做为脉宽控制的定时方式,这一方式产生的脉冲宽度极其精确,误差只在几个us。
方案二:采用软件延时方式,这一方式在精度上不及方案一,特别是在引入中断后,将有一定的误差。但是基于不占用定时器资源,且对于直流电机,采用软件延时所产生的定时误差在允许范围,故采用方案二。
二、 系统分析与设计:
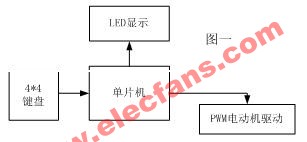
总体设计方案的硬件部分详细框图如图一所示。
键盘向单片机输入相应控制指令,由单片机通过P2.0与P2.1其中一口输出与转速相应的PWM脉冲,另一口输出低电平,经过信号放大、光耦传递,驱动H型桥式电动机控制电路,实现电动机转向与转速的控制。电动机的运转状态通过LED显示出来。电动机所处速度级以速度档级数显示。正转时数字向右移动,反转时数字向左移动。移动速度分7档,快慢与电动机所处速度级快慢一一对应。每次电动机启动后开始计时,停止时LED显示出本次运转所用时间,时间精确到0.1s。
1、系统的硬件电路设计与分析
电动机PWM驱动模块的电路设计与实现具体电路见下图二。本电路采用的是基于PWM原理的H型桥式驱动电路。
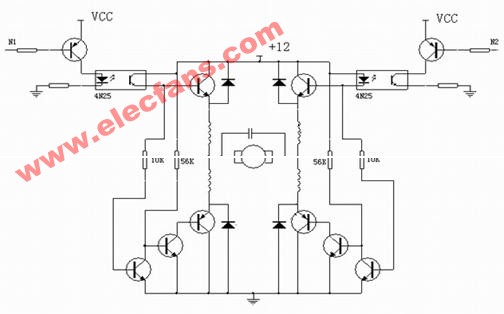
PWM电路由四个大功率晶体管组成H型桥式电路构成,四部分晶体管以对角组合分为两组:根据两个输入端的高低电平决定晶体管的导通和截止。4个二极管在电路中起防止晶体管产生反向电压的保护作用。4个电感在电路中是起防止电动机两端的电流和晶体管上的电流过大的保护作用。
在实验中的控制系统电压统一为5v电源,因此若达林顿管基极由控制系统直接控制,则控制电压最高为5V,再加上三极管本身压降,加到电动机两端的电压就只有4V左右,严重减弱了电动机的驱动力。基于上述考虑,我们运用了4N25光耦集成块,将控制部分与电动机的驱动部分隔离开来。输入端各通过一个三极管增大光耦的驱动电流;电动机驱动部分通过外接12V电源驱动。这样不仅增加了各系统模块之间的隔离度,也使驱动电流得到了大大的增强。
在电动机驱动信号方面,我们采用了占空比可调的周期矩形信号控制。脉冲频率对电动机转速有影响,脉冲频率高连续性好,但带带负载能力差脉冲频率低则反之。经实验发现,脉冲频率在40Hz以上,电动机转动平稳,但加负载后,速度下降明显,低速时甚至会停转;脉冲频率在10Hz以下,电动机转动有明显跳动现象。实验证明,脉冲频率在15Hz-30Hz时效果最佳。而具体采用的频率可根据个别电动机性能在此范围内调节。通过N1输入信号,N2输入低电平与N1输入低电平,N2输入信号分别实现电动机的正转与反转功能。通过对信号占空比的调整来对车速进行调节。速度分7档控制,从高电平(第6档)到低电平(第0档)中间占空比以20%逐极递减。速度微调方面,可以通过对占空比以1%的跨度逐增或逐减分别实现对速度的逐加或逐减。
2、系统的软件设计
本系统编程部分工作采用KELI-C51语言完成,采用模块化的设计方法,与各子程序做为实现各部分功能和过程的入口,完成键盘输入、按键识别和功能、PWM脉宽控制和LED显示等部分的设计。
单片机资源分配如下表:
|
P0 |
显示模块接口 |
外部中断0 (P3.2) |
键盘中断 |
|
P1 |
键盘模块接口 |
||
|
P2.0/P2.1 |
PWM电机驱动接口 |
内部定时器0 |
系统时钟 |

")

")

