・上一文章:基于MSP430单片机的智能水位计设计
・下一文章:基于Proteus的核信号输入LCD处理显示单元
摘要:针对科研实验中对拉压千斤顶加栽过程控制的需要,采用ATmega128单片机控制步进电机进而实现对执行系统的电动泵站实行自动控制。对力和位移的数据采集与处理及用步进电机控制电动泵站手柄的技术细节作了重点描述。通过单片机的A/D变换器对AMP放大模块采集的电桥信号作量化处理,千斤顶的操控手柄位置依电动油泵阀门开启的方向和大小作若干定位,单片机根据力或位移传感器信号,实时控制步进电机驱动手柄旋转到相应探控位置。
关键词:电动油泵;千斤顶;传感器;AVR单片机;A/D变换;串口通信;VB编程
分离式液压千斤顶在生产建设、科学实验等各类工程结构加载工作中具有广泛的用途。
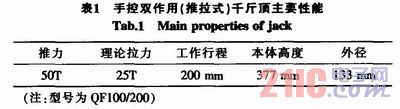
该设备一般由电动高压油泵+压(拉)千斤顶组成,本文论及的加载系统规格如表1所示。
油泵电机直接带动泵轴旋转,柱塞作往复运动,进油阀/排油阀工作,液压油通过高压油管进入千斤顶。用户可通过泵站上的手柄,人工转动泵内卸荷阀处于不同位置,实现系统的加载/卸载、推力/拉力及加载速率和稳压作业。
在对力和位移数值或稳压时间等精度要求较高的科研实验加载场合,显然这种仅靠手工操作的方式难以胜任。给该设备增设电脑测控系统就成为一项与时俱进的技术革新,也是提高此类设备性价比的最佳方案。
1 下位机
由ATmega128构成下位机控制核心(见图1),其主要是对各通道放大模块传入的工作信号进行A/D变换,并根据上位机的指令驱动步进电机,达到控制执行系统的工作目的。

1.1 数据采集
力和位移信号的测试由电阻应变计组成的电桥传感器完成,信号放大器采用AMP1型放大模块。此两者间的适当匹配对单片机能否顺利执行数据采集工作至关重要。技术关键是对电桥平衡的调控。信号进入单片机后,若有少量的偏移电压可通过软件作些补偿,若偏移量过大会造成此通道无法工作。因此有必要在放大模块的前端,用电位器把偏移较大的模拟信号调整过来。调零电路如图2所示。


")

")

