・上一文章:设计弹载共形遥测天线
・下一文章:惠普HP6P型激光打印机,进纸时出现卡纸
3.2初始模型建立
初始模型建立过程如下:
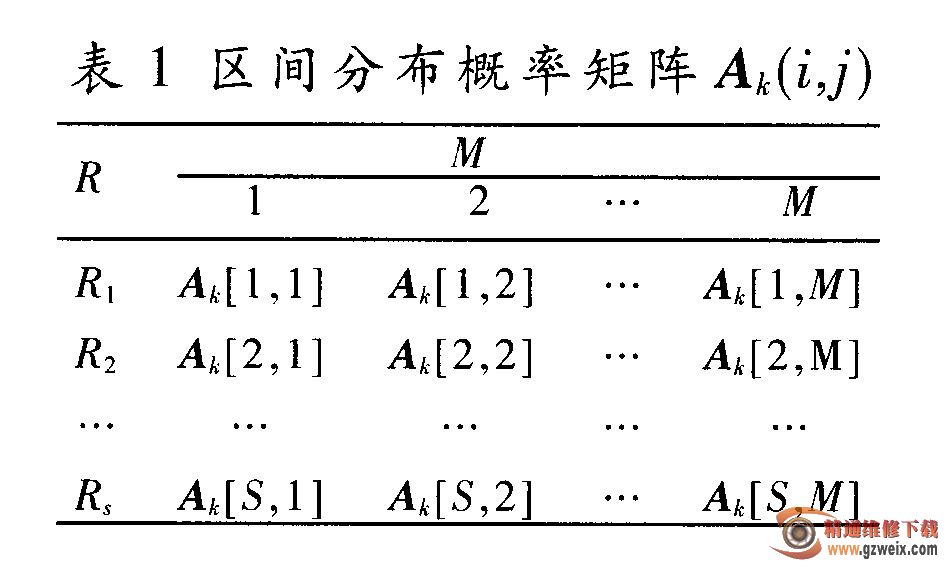
(1)为每个观测点建立对应的区间分布概率矩阵。以X轴为例,在某个观测点处,M个手势的N个观测值属于S个不同的特征区间。每个观测点处会对应一个区间分布概率矩阵A,例如在第K个观测点处的区间分布概率矩阵为:Ak(i,j),1≤i≤S,1≤j≤M。
(2)区间分布概率矩阵初始化。每种手势的样本数为N0=N/M,假设在第K个观测点处,手势j (1 ≤j≤M)有n(0≤ n ≤N0)个样本中的观测值属于第i个特征区间,则Ak[L,j]=n/No。这样就可以得到第K个观测点处对应的区间分布概率矩阵Ak(i,j),如表1所示。显然满足: =1。
=1。
(3)用以上步骤分别为X,Y和Z轴上各观测点建立区间分布概率矩阵,这些矩阵构成了区间分布概率矩阵初始模型(在X, Y和Z轴上选取的观测点可以不一样)。
3.3模型优化
为了提高识别率,还需要对各观测点对应的区间分布概率矩阵进行优化训练。在区间分布概率矩阵初始模型已有的N个样本中继续添加新的训练样本。每添加一个新的训练样本,在各观测点处就会生成一个新的区间分布概率矩阵。例如,在X轴上第k个观测点处会生成一个新的区间分布概率矩阵Ak1 [i,j]。随着训练样本的添加,各观测点处的区间分布概率矩阵会趋于一个常数矩阵,这时达到了最优模型,此时的区间分布概率矩阵模型可以用到手势的在线识别中。
4在线识别
在线识别过程如下:
(1)信号预处理和检测各观测点处对应的特征区间。以X轴为例,当某一手势数据输入时,首先经过信号预处理,然后检测X轴上各观测点处观测值对应的特征区间,输出观测序列O={O1,O2,...,Ok)。例如,在第一个观测点处观测值对应的特征区间为R2,则O1=R2。
(2)计算每一种手势在X轴上输出上述观测序列时的概率值。假设在第l个观测点Ol处的观测值属于第i个区间Ri,则手势m在第l个观测点Ol处的观测值属于区间R2的概率为:
则手势m即为要识别的手势动作。
(3)将以上识别过程在X,Y,Z轴上分别实现。
5实验结果与评价
为了使传感器与测量点之间尽可能地相对稳定,避免因手势的变化引起传感器偏离原始测量位置,使识别结果产生较大误差,本系统中,把数据采集和发送模块做成了一个小巧的戒指,通过无线的方式将采集到的数据实时地发送给微处理器进行处理和识别。实验时,将戒指模块戴到左手或右手食指的第二节,这样,MMA7361L加速度传感器相对于手指的位置是固定的。
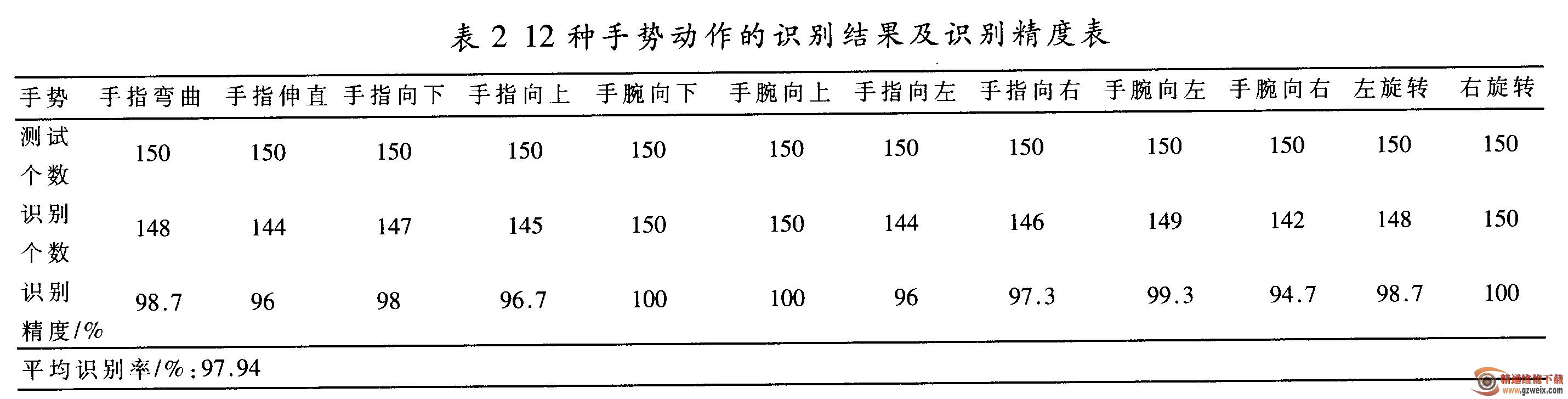
实验中选用了30名志愿者,每个志愿者在自己习惯和放松的状态下,以正常的速度匀速执行预定义的12种手势,每种手势重复做10次,实验中随机选取了5次动作进行训练优化模型,其余的5次动作进行测试,共采集了3 600组样本数据。
实验结果如表2所示。平均识别率为97.94%,手腕向下、手腕向上和右旋转的识别率最高为100%,手腕向右的识别率最低为94.7%。为了更好地说明本文的识别方法在识别率和实时效果上比其他算法更具有优势,实验中同时用HMM和DTW算法对这12中手势进行了识别,平均识别率分别为79.08%和85.2%,并且延时比较明显。基于本文识别方法对手势动作的整体识别率较高,实施效果好,说明本文的识别方法能有效实时地完成人机动态交互。
本文通过对加速度传感器MMA7361L采集到的手势动作加速度数据的分析,经过动作数据自动检测、归一化和三次样条插值预处理,最后根据完成相同手势动作得到的三维加速度数据变化规律的相似性,提出一种基于区间分布概率矩阵模型的动态手势识别方法,简化了传统算法识别过程的复杂度,成功地降低了手势识别难度,从而提高了基于加速度传感器手势识别的人机交互实时性,在一定程度上解决了动态实时性与识别率的相互矛盾性。





