・上一文章:基于NI技术的OFDM发射接收系统
・下一文章:LabVIEW在全自动点胶机中的应用
四、 永磁同步直线电机硬件在环实时仿真平台
借助National Instruments公司的LabVIEW 8.6.1、cRIO9074、cRIO9004和9401、9215、9264、9205高速数、模采集卡软、硬件平台,在较短的时间内搭建了一套永磁同步直线电机硬件在环实时仿真平台。该平台运用矢量控制算法,根据需要可以实现位置环、速度环和电流环三环或速度环和电流环二环闭环控制,电流最高采样频率达到20kS/s(周期50us),高于科尔摩根直线电机驱动器电流采样率16kS/s(周期62.5us)。系统的位置和速度输出可以快速无差地跟踪给定的位置和速度信号,精度达到几个微米级别,可以在线调节控制器参数和直线电机负载,仿真结果与实际科尔摩根系统类似。该平台的主要功能模块有:参数设置模块、直线电机模型仿真模块、直线电机控制器仿真模块、图形显示模块和数据记录与分析模块。该平台的示意图如图2所示:
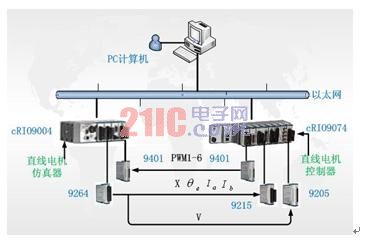
图2 永磁同步直线电机硬件在环实时仿真平台示意图
参数设置模块: 用来设置直线电机参数、负载系数、粘滋磨擦系数、直流母线电压、采样频率、初始控制器参数、三角载波频率与幅值、PWM模块中的死区时间等。其中直线电机参数、负载系数、粘滋磨擦系数、直流母线电压用于直线电机模型仿真模块(采样频率100kS/s);初始控制器参数、三角载波频率与幅值、PWM模块中的死区时间用于直线电机控制器仿真模块(采样频率20kS/s)。这部分子程序是在cRIO9074、cRIO9004的RT控制器中开发成功。
直线电机模型仿真模块:采用直线电机数学模型和运动方程来模拟实际直线电机的运行状态,把得到的直线电机各项运行数据送到直线电机控制器仿真模块。根据参数设置模块获得的直线电机参数,进行归一化处理,得到直线电机归一化参数。采集由直线电机控制器仿真模块发来的6路PWM信号(采用高速数字采集卡9401),结合直流母线电压和当前直线电机相电流正、负方向信号,计算出直线电机三相相电压,进行Clarke-Park变换,得到dq轴电压。然后根据归一化的直线电机dq轴方程计算出下一步直线电机dq轴电流、三相相电流、电磁推力。根据直线电机运动方程计算直线电机的加速度、速度、位移、电角度等信号,通过高速模拟输出卡9264,把上面计算出的两路相电流、速度、位移、电角度共5路信号送到直线电机控制器仿真模块。这部分子程序是在cRIO9004(内插9401和9264)的FPGA中开发成功。该模块的子程序框图如图3所示。
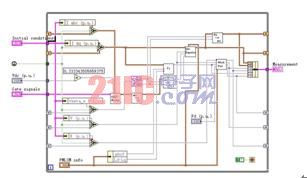
图3 永磁同步直线电机模型仿真子程序框图
直线电机控制器仿真模块:该模块包含位置环、速度环、电流环三环和速度环、电流环二环闭环控制两个子程序,实现对模拟的直线电机进行速度或位置的闭环控制功能。以位置环闭环控制为例,来说明该模块的主要功能。采用9215和9205模拟采集卡采集到直线电机模型仿真模块发来的直线电机位置、电角速度、两路直线电机相电流和速度信号。根据位置给定信号和采集到的位置反馈信号,求出偏差值送入位置环PI调节器,其输出作为速度给定信号。以此类推,经过速度环PI调节器、电流环PI调节器(含d、q轴)得到d、q轴给定电压信号,通过Clarke-Park逆变换,得到三相相电压调制信号。这些信号与三角载波信号进行比较,得到包括正、反6路PWM信号(算法考虑了死区效应,防止逆变器上、下桥臂短路),通过9401高速数据采集卡输出到直线电机模型仿真模块,至此整个直线电机位置闭环控制得以实现。这部分子程序是在cRIO9074(内插9401、9205和9215)的FPGA中开发成功。位置环子程序程序框图和前面板图分别如图4、5所示。
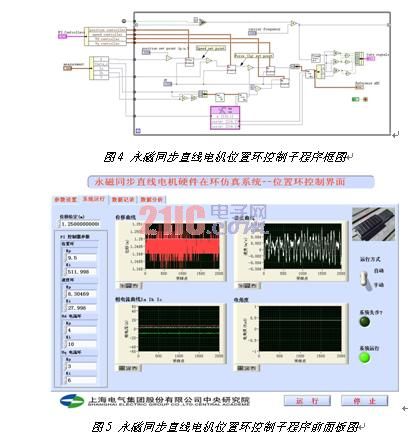
图形显示模块:实时动态显示直线电机的位移、速度、三相相电流、位置角度、PWM波形曲线。通过FIFO实现直线电机模型仿真模块和直线电机控制器仿真模块的FPGA与RT控制器进行数据实时交换。这部分子程序是在cRIO9074、cRIO9004的RT控制器中开发成功。
数据记录与分析模块:存取直线电机的位移、速度、三相相电流、位置角度、PWM波形等数据,分析直线电机电流、电压谐波分布等,为进一步优化算法提供数据。这部分子程序同样是在cRIO9074、cRIO9004的RT控制器中开发成功。
三、仿真实例
3.1 平台的软、硬件组成
永磁同步直线电机硬件在环实时仿真平台软、硬件组成如下:
软件平台:LabVIEW8.6.1/RT/FPGA
硬件平台:
cRIO9074、9401、9205和9215组成控制器仿真硬件平台;
cRIO9004、9104、9401和9264组成仿真器仿真硬件平台
一台PC计算机;
室内网络。
图6给出了永磁同步直线电机的硬件在环实时仿真与试验平台实物图。
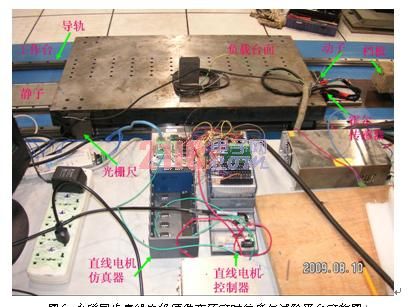
图6 永磁同步直线电机硬件在环实时仿真与试验平台实物图





