・上一文章:选择硬件在环(HIL)测试系统I/O接口
・下一文章:使用NI LabVIEW软件和PXI硬件完成飞机喷流噪声测量
挑战二. 更小、更轻、更强大的执行机构
出于机器人体积和自重的考虑,一般希望执行机构也更轻更小;但同时由于不同的运动要求,又希望执行机构具有强大的功能。随着移动性需求从传统的四轮系统向新型仿生机械的不断演进,对精密执行机构的需求也随之大幅提升。世界上众多的专业厂商一直从事这方面的研发,不断推出高 性能的产品。
对于机器人应用领域来说,创造更小、更轻、更强大的执行机构的最终目标是将它们用于机器人设计中,而且执行机构的强大功能往往需要通过复杂的编程才能发挥出来。因此,随着执行机构变得越来越精密复杂,如何通过编程完成高精度和高复杂度的控制,也成为机器人系统开发的关键问题之一。许多机器人领域的开发人员并不具有运动控制方面的专业背景,在这种情况下,执行机构的交互式控制开发更显得尤为重要。NI依靠超过25年与执行机构连接的经验,通过提供基于各种平台的硬件接口模块和交互式的软件工具不断降低控制开发的复杂性,同时提高交互性和灵活性。NI还与行业内领先制造商(如Maxon Moter)合作,使其产品的编程开发更加简便。
此外,在构建复杂运动系统的执行机构时,电机之间的协调工作也十分重要,比如在四轮驱动系统转向或机械臂动作中,就需要多个电机配合协调工作。运用NI LabVIEW机器人模块中所提供的Steering函数组和Kinematics函数组,就可以直接计算出在这些应用中每个电机分别需要的转动速度,从而帮助机器人设计人员缩短了从高性能电机到创新机器人应用之间的距离。

图2 NI嵌入式硬件平台CompactRIO提供方便的电机接口,并可通过LabVIEW软件交互式地完成软件开发
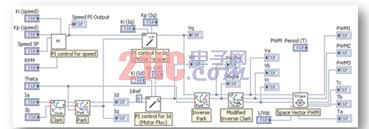
图3 基于LabVIEW FPGA实现的FOC算法可以进一步提高现有电机控制系统的性能和效率
挑战三. 对工业级软件开发平台的需求
除了硬件之外,机器人领域的研发人员还需要功能强大的软件来设计他们的自主系统。人们往往容易忽视这一点,许多人认为“任何事情立即从头设计都是相对简单的”,但这对于当今机器人飞速发展的时代是不适用的。事实上,随着一些技术领域的趋同并形成某种事实上的标准,创新已经不再意味着只是从零开始,更多的创新应用都是将模块化的算法和功能组织在一起而完成的。机器人领域亦不例外,需要标准、工业级的软件提供现成可用的算法和工具,从而帮助研发人员更快地完成创新。
1. 该软件必须是直观式的
许多机器人研发人员都具有机械工程或电子工程背景,但没有时间和精力去学习复杂的计算机软件技术,所以需要一款集成常用函数和算法的软件开发工具,该工具还必须具有良好的交互性和易用性。此外,自主系统的终端用户往往是营救人员(如消防员)、士兵或老年人等,他们也不一定具备计算机知识,因此用户界面也必须足够直观。
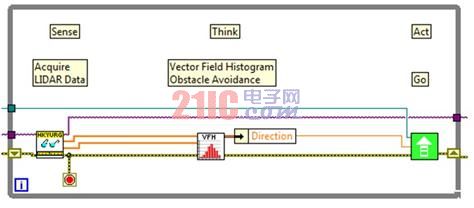
图4 机器人设计软件应该是非常直观的。LabVIEW图形化编程通过直观的框图和连线完成了LIDAR数据采集、障碍物回避决策、刹车制动等三个步骤,清晰易读(有文字的淡黄色部分为程序注释)
2. 软件必须具备与硬件的良好集成性
每个自主系统都必须感知或察觉周围世界的环境并做出反应。感知系统需要外部传感器(如激光测距仪、声纳传感器等),做出反应则要依靠不同类型的执行机构完成。因此软件工具必须能够直接驱动各种传感器和执行机构。除了感知系统和执行控制,往往还需要在真实硬件上实现决策规划,这意味着软件必须具有与实时系统、实时嵌入式硬件、甚至FPGA的强大交互性。目前的许多机器人软件开发包缺乏类似功能,它们能够仿真并在开发机器上运行,但不具备在实时硬件目标上的执行能力。





