3.2 仿真实验
在MATLAB/Simulink仿真环境下建立直接转矩控制系统的仿真平台时,系统采样周期可设定为0.1 ms,异步感应电动机的其它各参数为:额定功率P
N=15 kW,额定电压V
N=380 V,额定频率f
N=50 Hz,定子电阻R
s=0.435 Ω,转子电阻R
r=0.816 Ω,定子电感L
s=0.002H,转子电感L
r=0.002H,定转子互感L
m=0.06931H,极对数p=2,转动惯量J=0.0918 kg.m
2。设定电机转速ω=20 rad/s时,采取1000组数据作为训练样本,5000组数据作为验证样本,最大训练次数设定为2000次,最小容许误差设定为0.001。
学习网络的隐含层节点个数经多次训练后确定为k
1=11和k
2=6,设n为输入节点个数。混沌变量个数m为神经网络所有权值、阈值的总和,m=156,蚁群种群数M=30,p=0.8,Q=50。其算法训练误差比较如表1所列。
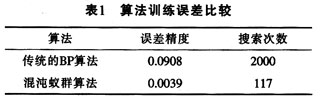
从表1可以看出,传统的BP算法优化神经网络的最小适应度收敛十分缓慢,并且误差较大。而混沌蚁群算法优化BP神经网络误差更小,精度更高,其收敛性要远远优于传统的BP算法。
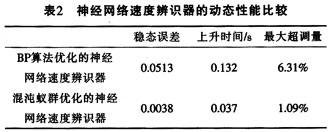
表2所列是由实验仿真结果中分别提取出的神经网络速度辨识器的动态性能指标。可以看出,混沌蚁群优化的神经网络较之传统BP算法的动态性能有了很大改进。
4 结束语
本文构造了一种基于混沌蚁群算法的BP神经网络模型,并将其应用到直接转矩控制系统中的转速辨识器中,从而显示出其辨识非线性函数的优越性能以及速度快、精度高的特点。仿真结果表明,用混沌蚁群优化的BP神经网络速度辨识器是可行的,而且具有较强的速度跟踪精度,可实现直接转矩控制系统的无速度传感器控制,而且系统具有良好的动、静态性能。
上一页 [1] [2] [3] 下一页





