・上一文章:三极管单级放大器
・下一文章:智能水位控制电路
这种简单的机器人具有光敏反应动作,可以避开障碍物。它不采用微控制器、编程器或PC。在电路中只有一个特殊的器件就是窗口鉴别器(新型的窗口比较器)。
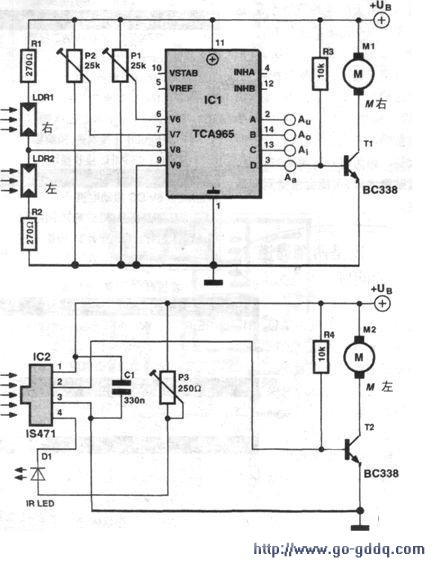
电路如上图所示。由电阻R1和R2与光敏电阻LDR1和LDR2构成一分压器(在光照条件下用R1和R2限制电流)。窗口鉴别器TCA965将中点电压和上阈值(用P1调节)及下阈值(用P2调节)进行比较。如果这电压设在低于(在窗口内)或高于(在窗口外)相应值,输出Au、Ai、Ao和Aa就进入高电平,否则保持低电平。输出Aa转换驱动右边电机的晶体管T1。光敏电阻可以装在运动机构的右边和左边,或者装在其前后。这就引发机器人转向右边,由于一边的电机停止转动,直到恢复所期待的光照关系为止。然后运动装置继续直线向前进行,光照关系再改变,在这一点再运行下去。
用窗口鉴别器其他输出能进行各种运动轨迹试验。如果用TCA965输出Au和Ao去驱动晶体管,机器人可以朝向光源或离开光源的运行,取决定连接方法。应用窗口鉴别器,机器人将工作在三点控制器规则下(左边,直线向前,右边)。如果把光敏电阻和光源一起装在运动机构下面的盒内,机器人可以在白色背景下沿黑色轨迹运动。
反射式红外线传感器能使机器人对障碍物作出反应,如下图所示。在这里应用夏普IS471型传感器,它运用在脉冲光的IR-LED照射下,采用精确的探测处理方法。当探测到障碍物时,输出(脚2)进入低电位,截止了晶体管T2。使电机M2停止转动,传动机构停止。IS471的灵敏度用P3调节。因为工作范围只有10-15cm,故传动机构不可运行的太快,否则就会撞到障碍物。
对于较大、快速运动的机器人探测障碍物也可采用超声波探测器。在软杆上可装上适当的机械按钮开关。障碍物探测器可驱动报警蜂鸣器或指示灯。
该电路工作4.5~1 6V电压的电源。如选用大电机要选用大功率晶体管和大容量电池。原作者串联2只4.8V可充电电池作电源,用大功率晶体管BC388驱动Lego微型电机。