・上一文章:加速度传感器在汽车防盗系统中的应用研究
・下一文章:一种汽车行驶记录仪的抗干扰设计
低端倒车雷达系统
倒车雷达系统一般由两部分组成,分别是探头部分和主控部分。探头部分一般安装在汽车的尾部或两侧,而主控部分则位于汽车的前端,靠近汽车驾驶员。低端倒车雷达(图5)的探头部分,通常只包含超声波传感器,而主控部分包括CPU和所有的外围电路。探头和主控板通过传导线连接,传送发送和回波信号,一个主控板带3到4个探头。低端的倒车雷达系统成本通常较低,多采用分立元件,集成度也较低,因而性能较差,有效测量距离小于1.5m。此外,报警也采用简单的蜂鸣器。

图5 低端倒车雷达系统框图
中端倒车雷达系统
中端的倒车雷达系统在探头上除了安装超声传感器以外,还包括发射信号的放大和驱动电路,以及接收信号的放大和信号调理电路,这样可以减小信号在长线传输中引入的噪声的影响。另外,在控制板上,使用了两级放大和带通滤波器以提高测量的性能。而测量的距离,通常通过数字显示的方式来显示,并且伴有声音的报警和提示。
高端倒车雷达系统
图7是一个高端的倒车雷达系统的系统框图。可以看到,本来处于主控端的一些功能模块都被转移到探头一端,它的特点是在探头上带有信号放大电路以及处理器,测量信号在传感器上实现处理,因此没有长线传输存在的信号干扰问题。另外,它可对每个传感器进行单独校准,通过LIN或其他串行方式与主CPU进行通讯。因为通常探头部分的体积都比较小,为了在探头上实现信号的放大和处理,就需要较高集成度的器件以方便传感器和PCB板的集成。
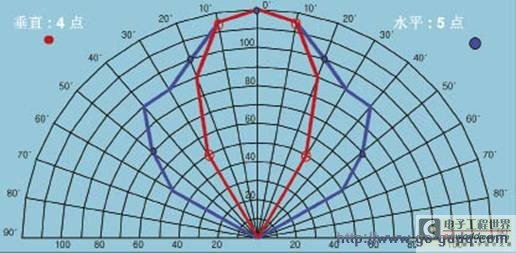
图8给出了倒车雷达传感器覆盖区域的要求,它要求在水平方向上70±5cm范围内最小100°;在100±5cm范围内,最小40°。垂直方向上,在50±5cm范围内最小60°;在110±5cm范围内,最小20°。
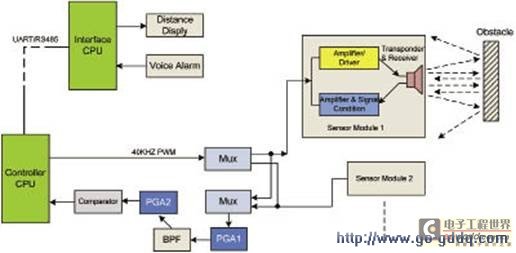
图6 中端倒车雷达系统框图
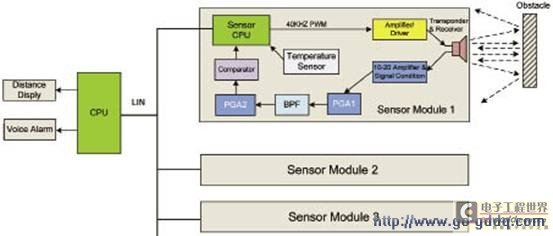
图7 高端倒车雷达系统框图