・上一文章:加速度传感器在汽车防盗系统中的应用研究
・下一文章:一种汽车行驶记录仪的抗干扰设计
图8 倒车雷达传感器覆盖区域要求
Cypress倒车雷达控制系统参考设计
Cypress的倒车雷达控制系统使用PSoC系统的主要原因是:1、它的资源灵活,PSoC的模块资源具有可编程性,针对不同客户、不同定位的产品需求可重新配置;2、集成度高,集成了PWM w/DB、比较器、A/D转换器PGA等模拟模块,模拟集成度高;3、它几乎不需要外部器件,降低了 BOM 成本, 减小了电路板尺寸;4、它的IP保护能力强,很难被复制。
PSoC倒车雷达控制器采用CY8C24633芯片作为主控芯片。芯片采用M8C处理器,运行速度高达24M,内含8×8的乘法器和32位的累加器。工作电压范围为3V~5.25V,温度范围为工业级:-40℃~85℃。该PSoC芯片包括4个数字模块和4个模拟模块(2CT/2SC)。另外它还拥有针对电机控制而优化的高速8 位 SAR AD转换器。
图9为Cypress倒车雷达系统的硬件框图,采用CY8C24633用于主控板。该设计使用收发一体的传感器,并在传感器端增加初级放大电路。驱动信号为40kHz的脉冲信号。每个传感器采用3线连接方式与主控板连接,最多可接6路传感器输入。对交流信号进行电平抬升,从而更好地处理回波信号。内部的模拟模块可配置成PGA、比较器及带通滤波器,并在器件内部实现互连。主控板与显示器通过串口连接,显示器通过数字方式显示探测距离。
图10给出了PSoC内部模块的配置和信号的路由,从图中可以看到,4个数字模块分别被配置成PWM计时器、定时器和串口发生器。而四个模拟模块分别被配置成两个PGA放大器和一个带通滤波器,信号的路由从图中也可以看得非常清楚,
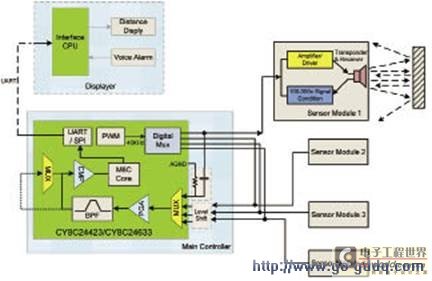
图9 Cypress倒车雷达控制系统硬件框图
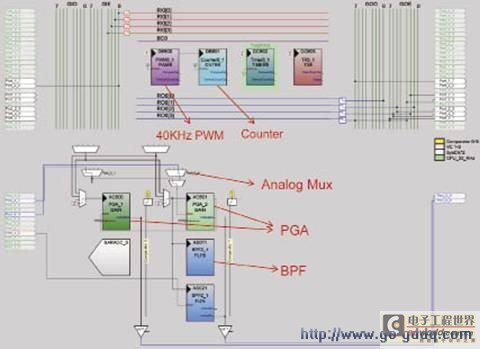
图10 PSoC内部模块配置





