����һ���£�GPS��GPRS��GIS�����ϵij������ϵͳ���
����һ���£��ƶ�ý��Դ������һ����������ϵͳ�����ƶ�����
�������������ڶ������档��ʼ�����ǵ�Ho�͵�H1����H1��ȷ����ͼ7��ʾ����G3�͵�G4�ֱ�Ϊ����11����12�ӳ��ߵĽ��㣬�Լ�����13����14�ӳ��ߵĽ��㡣
����Ϊʹ���о�����NQȫ�����Ĺ��ߴ�����EC���䣬Ҫ����

ʽ�У�z3��z4�ֱ�Ϊ��G3�͵�G4�ĺ����ꣻS09Ϊ������CD���䣬�ɲ�ǰ�ֱ�Ϊw1��w2�����й�����Ľ����ڴ�ֱ�ڹ����ƽ�����γɵ�ͶӰ�����SrTwΪ������FMȫ������ɾ�����EC����ɵIJ�ǰΪw1�͢��������й�����Ľ����ڴ�ֱ�ڹ���ƽ�����γɵ�ͶӰ�������ѡȡ��H��ʱ��Ҫ���H1�ĺ�����������ʽ�Ҵ��ڵ�M�ĺ����꣨���ڼӹ�ʱ��ģ������H��Ӧλ������FM���·�������TV�ڵ�Ho���ķ�����z������ļнǽϴ�һ����3rad���ң�����ȷ����Hl���������T�����ڵ�H0���ķ���֮�ɽ�������TV������NQ����⡣

�������ߢ�������NQ�������̷ֱ�������AT������FM����������ͬ�����������TVʱ���������ߢ��ڵ�H0���ķ�����z������ļнǽϴ���H0��������������С�����������TV�ķ�����X������ļн�С��1.9rad֮ǰ������TV������NQ���������ɡ�֮�ֱ��������NQ������T�����ϵ�����㣬�õ�����NQ�����ߢ���
����Ϊ����ӹ������߶����ӵ�E�͵�F����E�ĺ�����Ӧ���ڵ�F�ĺ����ꣻ���߶����ӵ�M�͵�N��Ȼ����תͶ�������������ߣ��õ�Ͷ������άģ�ͣ�����Ͷ���������ɡ�
����5 ���ʵ����ģ�����
��������1×1�O112��LEDоƬ��Ϊ��Դ��Ͷ�������ò���ѡ���л�������PMMA����Ҫ��LEDоƬ�����г���⾭Ͷ�������ú�ֲ��ڹ�������2��
�����ķ�Χ�ڡ���оƬ��Ե������������������ߵĶ˵�ȡΪ��һ4��6����
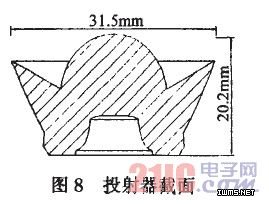
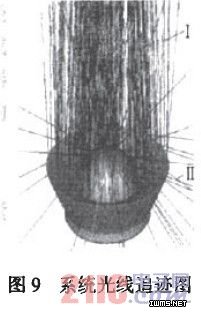
���������������������������õĸ����������ϵĵ㵼��UG����������ϣ�Ȼ��������ɵ����������ƹ�����ת�õ�Ͷ��������άģͼ8Ͷ���������͡�ͼ8�Ǹ�Ͷ�����Ľ������γߴ磬���������ֱ��Ϊ31.5mm���߶�Ϊ20.2mm���ٽ�Ͷ��������άģ�͵���Tracepro������LED�������й�������ͼ9Ϊϵͳ�Ĺ�����ͼ��I��ΪLED����⾭Ͷ�������ú�ֲ���Ԥ���Ĺ�ֲ���Χ�ڵĹ���������ΪLED����⾭������������������γɵĹ�����ͼ10Ϊ��Ͷ��������50mm��Ŀ��ƽ����նȷֲ�ͼ��

����ģ��������������
������1��ϵͳ�ṹʮ�ֽ��ա�
������2��ϵͳ��Ч�ʴ���ͼ9ϵͳ������ͼ91����������ʧ��Ҫ���ɸ�������ķ����������Լ�Ͷ�������ò��϶Թ��ܵ���������ġ�
������3��Ͷ������Ч��ʵ���˶�LEDȫ���������ռ��Ͷ�����ơ�
����6 ����
�������������һ��ʵ�ֶԴ���LED�������Ч�ռ��Ͷ�����Ƶ�Ͷ������Ʒ���������LED�ij����ֲ���Ԥ���Ĺ�ֲ���Χ����ѧ��չ���غ㶨�ɣ�����ͬ�������淽����ø��������ȫ���������������ϵĵ㡣��UG�����ȶ���������������ϣ���ͨ����ת������ߵõ�Ͷ����ģ���Լ��ʺ����ؼӹ����������ݣ�Ȼ���ٽ���ģ�͵���Tracepro��ѧ���ר����������u��D�������й�����������ϵͳ��Ч�ʽ����˷����о����ø��ַ�����ƵĶ���Ͷ�����ṹ���ա����ܴ���Ч�ʸߣ�����Ч�ռ��Ͷ������UD��ȫ������⡣





