・上一文章:基于ADV7125的嵌入式系统VGA接口设计
・下一文章:STM32L152和S14432的无线网络系统设计
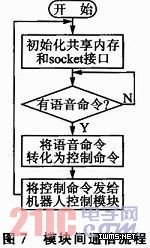
3.3.2 模块间通信
由于系统的3个模块不在同一个平台上部署,运行过程中需要进行数据通信。GUI和Julius都部署在Atom Z510平台上,但属于2个进程,它们之间可以通过共享内存来交互数据。而GUI和机器人控制模块就需要通过网络通信来实现数据交互。这里采用的是基于TCP的socket编程接口来实现模块间的通信,模块间通信流程如图7所示。
4 实验测试
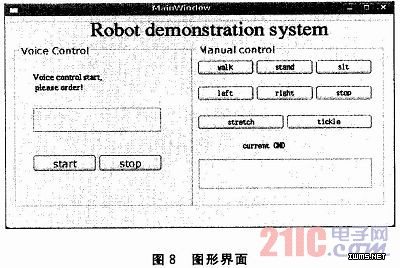
演示系统界面如图8所示。本文使用大量的语音样本来完成HTK的训练和模式构建,语音样本采用16 kHz采样,16位量化。独立的语音识别测试中,将训练集以及测试集中语音样本和识别结果进行了对比分析。本文语音样本的内容包括训练集(语料库中的语音成分)和测试集(本实验中采集的语音)。由于本系统只用提取语音命令,不需要完整句子的识别,所以没有针对句子做测试。
本文对于训练集基于词的识别率为71.7%,测试集基于词的识别率为56.5%,测试结果如表1所列。
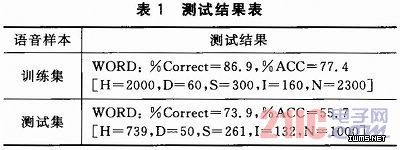
表中各符号所表示的意义如下所示:
H,正确;S,替代错误;D,删除错误;I,插入错误;N,标记文件中单元总数;SENT,句子,WORD:基本单元。
![]()
结语
本文在给定的实验室机器人平台上,设计了基于语音控制的机器狗系统。其中,语音识别子系统通过HTK和Julius的开源平台构建而成。经过测试分析,该系统能够较好地识别人发出的语音命令,简化了机器人的操作,使机器与人的交互更加智能化。





