����һ���£�һ�����ߴ������������ռ���ʵ��
����һ���£�LTC4350�����������о�
ժҪ����������ǻ�����ϵͳ����Ҫ��ɲ��֣���������Ҫ�о�����Ӷ��������ļ��ϵͳ����ϵͳ�ǻ���AVR ��Ƭ�������ģ��ɶ������ĵ����ѹ����ŵ������¶��Լ�ʪ�ȵȽ���ʵʱ��⡣Ҫʵ�ֵ��������ļ��м�⣬������Ҫ��Ƶ�ز����ĵ�Ԫ�ɼ���·������صĵ�ѹ���������¶ȵ����ݲɼ�������Ȼ�����뵽��A/D ת��ģ��ĵ�Ƭ���������ݽ��м�¼����ʾ�����Ķ�ϵͳ��������Ӳ����ƽ��������о��ͷ�����
����1 ����
����������Ӷ�����ع��ɵĵ�ѹ��Դ����ˮ�»�����ϵͳ�еĹؼ��豸��������ӵ�ص�ά������������ֱ��Ӱ������ӵ�ص�ʹ��Ч�������������ֱ����﮵�أ��Ӷ�Ӱ��ˮ�»������������ܣ���������»��ᵼ�»����˵İ�ȫ�¹ʡ�ͨ�����߲�������Ӷ��������IJ��������Լ�ʱ�˽�����ӵ�صĹ���״̬���������Լ�����ӵ����Ҫά��������������Ӷ�����ص������ϵͳ���������ڱ��С�
����Ϊ��ʵ������Ӷ�����ز����ļ�⣬��ѡ��Ҫ��Ʋ����ɼ�ģ�飬������Ӷ�����صĵ�ѹ���������¶ȵȲ����ɼ�������ͬʱ�ϴ�������A/D ת��ģ��ĵ�Ƭ���У�����Щ���ݽ��м�¼����ʾ��
����2 ����Ӷ��������ļ��ϵͳ����
������ϵͳ���÷�ɢ���ݲɼ��ͼ������ݴ������ֱ���Ƶ�ѹ�ɼ���·�������ɼ���·���¶Ȳɼ���·��Ȼ������ݶ����͵���Ƭ�����м��д�����ϵͳ�ṹͼ��ͼ2-1 ��ʾ��
����
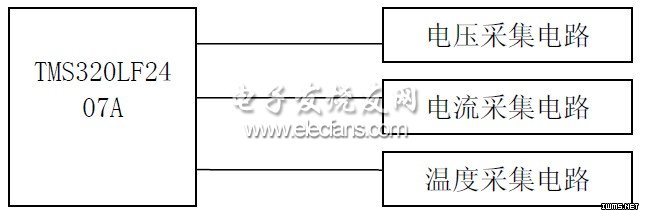
����ͼ2-1 ϵͳ�ṹͼ��
������ϵͳ���Ķ����ǹ���863 ��Ŀˮ�»�����ϵͳ������Ӷ�������飬�õ�����������Ƽ�������TS-LFP160AHA �ͺŵ�����Ӷ�����أ��������8 �鵥������ɡ���Ҫ���ÿ�鵥���صĶ˵�ѹ����������ѹ��Ƿѹ�ж�;��Ҫ�����¶ȣ����ÿ���ص��¶��Լ�����������������¶ȡ�ʪ��;����8 �鵥���ش���������ֻ��Ҫ������������������������жϡ�
�������IJ�����TMS320LF2407A оƬ�����ô�оƬ��Ϊ��ؼ��ϵͳ��CPU �����������¼������棺
����1.���ܣ������Ѿ���Ϊ�ִ������豸��Ƶ�һ���ȵ����⡣���豸�ɶ��ε������Ϊ��Դ��ʱ�����������ø���ͻ������Ҫ�������ʹ�õ�DSP ��3.3V ��Դ���磬��С�˿���������ġ�оƬ��Դ������������ģʽ���ܶ�������������ת�����ģʽ��
����2.16 ͨ�������A/D ת��������һ����ڶ�·�ɼ��ӵ�·�������塣����ֱ�ӽ��ɼ���·������ӵ�DSP ��A/D ת��ͨ������������DSP ��������A/D ת����·��
����3.40 ���ɵ�����̻��õ�����������š������ڰ�ȫ���ؼ����������·�Ŀ��ơ�
����4.����ͨ�Žӿ�(SCI)��16 λ��������ӿ�ģ��(SPI)���ԽӼ��ϵͳ����ʾ���֡�
����3 ϵͳ��Ӳ�����
����ϵͳ��Ӳ�������Ҫ������ѹ�ɼ���·�������ɼ���·���¶Ȳɼ���·��ơ��ɼ���·��TMS320LF2407A ΪCPU��TMS320LF2407A ��TI ��˾רΪʵʱ���ƶ���Ƶĸ�����16 λ����DSP ������ָ������Ϊ33ns�����ڲ�������ǰ�˲���A/D ת�����ͺ��PWM ���Ӳ����������ϵͳʵʱ��Ҫ���ͬʱ�ɼ�Ӳ����·��ơ�
����3.1 ��ѹ�ɼ���·���
���������������Ӷ������Ϊ�������������8 ��3.6V ﮵����ɡ�ÿ����ص���Ķ��ѹΪ3.6V ����ʱ�˵�ѹΪ4.25V��Ҫ���ѹ�ɼ����ȿ�����1.5%���ڡ���ع���ϵͳҪ�����Ͳ���Ƶ��Ϊ20ms��
����ϵͳ�������Թ�����Ϊ��������ݲɼ�ϵͳ���źŴ��ݲ��������������ͽ�ǰ�˵�ÿһ�ڵ�صĵ�ѹ�������������صĴ��ѹ��һ��������С���Ա㽫��ر仯�ĵ�ѹֵ��ʵ�ط�ӳ��DSP������辭����·���ؽ������������м��㡣���������ŵ����ٶȿ�(������ٶ����뼶��ԶС�ڼ̵����ĺ��뼶)��ʵʱ��Ҫ�á�����������˵��ź��ڵ�����������ȫ���룬�������κι�ϵ�����Լ�ʹ�ڹ��������˷�����·Ҳ�������ص�ʹ������κ�Ӱ�졣�����ѹ�ź�ת��Ϊ�����źŽ��вɼ�������˹������⡣���ѹ��������ȣ�������Լ۱ȸ��ߡ�
������ѡ��������ʱ�����ǿ��ǵ������Ժ�ʵ���ԣ���������ѡ�����ձ���֥��˾������TLP521������Ŵ���ѡ���˫����Ŵ���TL082��
������ص���ĵ�ѹ������·����ͼ3-1 ��ʾ��
����
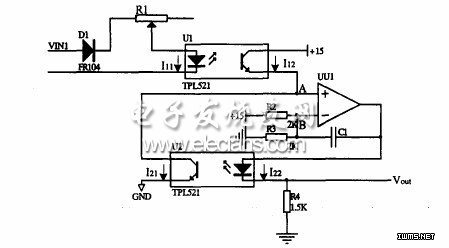
����ͼ3-1 �����ص�ѹ�ɼ���·��
����VIN ����ص����ѹ������R1������еķ���������γɻ�·������ѹ�ź�(VIN)ת��Ϊ�����ź�( I11)��I11��I21��һ��������ϵI11∝ I21��UU1 ��������Ϊ�Ƚ���ʹ�á���A���ѹVa����B ���ѹVb��UU1 �������һЩ�ĵ�ѹֵ����A ���ѹVa����B ���ѹVb��UU1 �������һЩ�ĵ�ѹֵ����������ѹ������·�У��Ƚ����γ�һ��������ʹA��B ����ĵ�ѹֵ����һ�¡���������Ŀ����B ���ѹ��Ȼ��15�M2=7.5v�� Va= Vb =7.5v��˵���������������е������ܵ�ͨ���һ���������������ܵĵ�ͨ������ܿ��ڷ�������ܵġ���֪��I21= I22ʱ�� I11= I22��������VIN�M= I11= I22= Vout�MR4���ɼ�Vout ��VIN �ɱ�����
����3.2 �����ɼ���·���
��������Ӷ�����������е�ص��崮�������������ϵͳ��ֻ����һ�������ɼ��㼴�ɡ�
�������IJ��û��������������ɼ���
��������������������ԭ��ͼ��3-2���������In������������Ĵų�����ͨ������Ԫ������źſ��ƵIJ�������Im�����μ���Ȧ�����Ĵų���������ԭ���븱�ߵĴų��ﵽƽ��ʱ�䲹������Im���ɾ�ȷ��ӳԭ�ߵ���Inֵ��
����
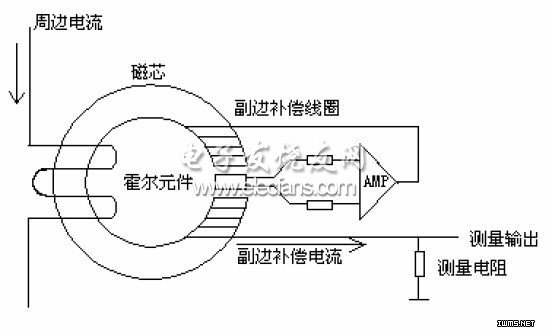
����ͼ3-2 ��������������ԭ��ͼ��





