・上一文章:基于STC89C52的多通道脉搏采集系统设计
・下一文章:基于ADS的功率放大器设计与仿真
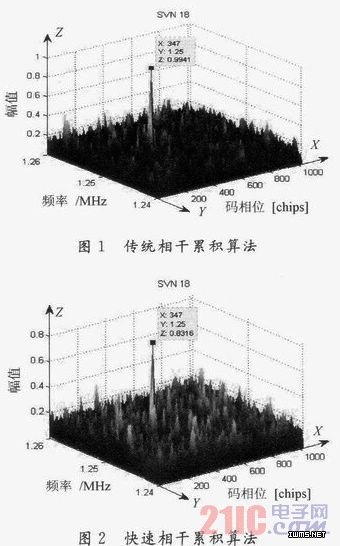
为了便于比较快速相干累积和传统相干累积算法的差异,图1和图2中的幅值坐标,均以传统相干累积的捕获峰值进行归一化处理。
在上述仿真条件不变的情况下,多次运行仿真程序两种方法均可稳定地捕获到信号,但将两组捕获峰值进行对比,传统相干累积30次捕获结果的相关峰值的均值为12.507×10-9;快速相干累积算法的捕获峰值为10.742×10-9。相对于传统相干累积算法,快速相干累积的相关峰均值下降了14.11%。可见,快速相干累积算法的总体性能优越,但在提高运算速度的同时,捕获结果中的相关峰值略有降低,这是该算法为获得高效率而付出的微小代价。
3 弱信号捕获方案设计
通过对导航电文的格式和编码规则分析,可确定每6 s出现一次的帧同步信息始终为10001011,因而利用已知的具有良好自相关特性的帧同步信息进行弱信号捕获是一个理想选择。总体方案设计如图3所示。
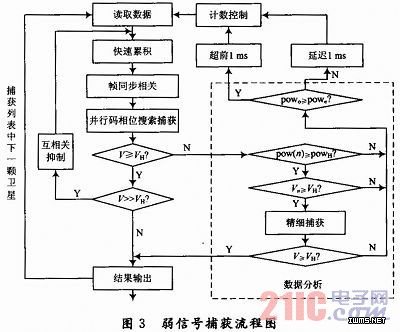
算法中使用了相对捕获的概念,即通过对多次相关峰值的比较,作为粗捕获结果,以此来估计是否存在卫星信号,再根据粗捕获结果进行小范围内的精细捕获。同时利用文献中提出的数据比特翻转估计方法,再与帧同步相关运算相结合,从而使比特翻转估计精度大为提高,可实现更长时间的相干累积,获得较高的信号处理增益。算法突出的特点是捕获过程中对不同强度信号采用不同的捕获流程,强信号快速直接捕获,对相对弱的信号通过较长时间的累积来获得信号。





