・上一文章:基于STM8S微处理器内部EEPROM的数据存储方法
・下一文章:三天线法校准原理及系统组成
1 电梯控制简介
电梯是现代建筑内关系到人民生命财产安全的重要交通工具。如何提高电梯的运行效率、降低电梯能耗以及减少机械磨损、延长电梯的使用寿命,都是非常重要的研究课题。电梯是楼层用以固定提升的成套设备,具有安全可靠、乘坐舒适、停层准确、操作简便、运输效率高等特点。它由提升曳引系统、引导系统、安全装置和电控系统组成。
目前电梯的控制普遍采用了两种方式,一是采用微机作为信号控制单元,完成电梯信号的采集、运行状态和功能的设定,实现电梯的自动调度和集选运行功能,拖动控制则由变频器来完成;第二种控制方式用可编程控制器(PLC)取代微机实现信号集选控制。从控制方式和性能上来说,这两种方法并没有太大的区别。国内厂家大多选择第二种方式,其原因在于生产规模较小,自己设计和制造微机控制装置成本较高;而PLC可靠性高,程序设计方便灵活。本设计在用三菱 FX2系列PLC控制静磁栅位移传感器实现电梯平层控制。
静磁栅位移传感器在电梯控制系统中的作用为电梯平层控制的调整,电控系统是电梯的“中枢神经”,其质量的好与坏直接影响电梯质量。客梯和医用梯都讲究乘坐舒适,而舒适感与运行时间有关。要想乘坐舒适,就要延长加、减速时间,因而使运行时间随之延长,电梯运行效率降低。所以,为了使电梯具有较高的运行效率,加减速度应该有一个合适的限度,而且变化要平稳,这就对电控系统提出了如下要求:
安全可靠,排除故障方便,在满足使用要求前提下,线路越简单越好。
噪声和振动小,选择元件要合理,电磁声不能大,安装零件的结构件要有足够刚度,且有防松措施。
能适应频繁起动、停止、调整及换向的工作要求,调速性能好,工作方式易于转换。加、减速和等速要平稳,速度曲线平滑,到站前无微动。
能实现自动平层,且平层必须准确。
能适应在较大范围内变动地提升载荷,能重载起动。
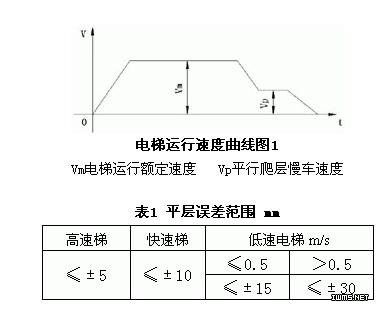
根据电梯运行的特点及以上要求,电梯的运行速度应当符合图1所示曲线。平层误差应符合表1规定。
2 静磁栅位移传感器简介
静磁栅位移传感器由“静磁栅源”和“静磁栅尺”两部分结合使用。“静磁栅源”使用铝合金压封无源钕铁硼磁栅组成磁栅编码阵列;“静磁栅尺”用内藏嵌入式微处理器系统的特制高强度铝合金管材封装,使用开关型霍尔传感器件组成霍尔编码阵列,铝合金管材外部使用防氧化镀塑处理。“静磁栅源”沿“静磁栅尺”轴线作无接触(相对间隙宽容度和相对姿态宽容度达50mm)相对运动时,由“静磁栅尺”解析出数字化位移信息,直接产生高于毫米数量级的位移量数字信号。充分发掘嵌入式微处理器的资源,将数据更新速度提高到毫秒数量级,以便能适应5m/S以下运动速度的位移响应。
3 产品综合特点
使用寿命长:无接触检测位置及角度,避免了机械损伤,理论上无寿命极限;
抗恶劣环境:-40℃至+100℃工作温度范围,连续高粉尘、泥浆、水下及高撞击、 强振动工作环境;
直接绝对型测量:直接指示位移毫米数或旋转角度数,无需换算,不怕掉电,任意定位控制;
量程极长,分辨率适中:260毫米-2000米长度量程,分辨率0.2mm-1mm;
极丰富的数据接口:4-20mA、1-5V等模拟量输出,各类串并行数据接口以及 PROFIBUS等各种现场总线;
安装维护方便:在保持适度间隙的条件下,无约束安装运行。
4 PLC控制静磁栅位移传感器实现电梯平层控制
要使电梯到达平层区域后能自动平层,必须有一套自动控制系统,即电梯的自动控制装置。该装置的控制部分是静磁栅位移传感器,以30层电梯为例,安装图如下图所示。
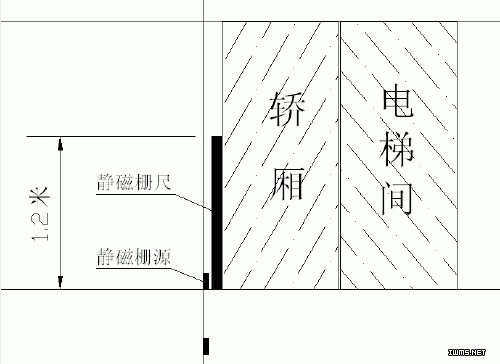
上图所示轿厢处于地下层上面的第一层,静磁栅源安装于电梯井道和室外层平行,每层一个,静磁栅尺安装于轿厢上,长度为1.2米,地下层安装两个静磁栅源,用于检测轿厢是否到底位和运动方向。
由于电梯的运行是根据楼层和轿厢的呼叫信号、行程信号进行控制,而楼层和轿厢的呼叫是随机的,因此,系统控制采用随机逻辑控制。即在以顺序逻辑控制实现电梯的基本控制要求的基础上,根据随机的输入信号,以及电梯的相应状态适时的控制电梯的运行。另外,轿厢的位置是由静磁栅位移传感器确定,并送 PLC的计数器来进行控制。同时,每层楼设置一个静磁栅源用于检测系统的楼层信号。
a. 当电梯定向上行时,静磁栅尺上行方向检测到静磁栅源,抱闸打开,电梯上行。当轿厢碰到上强迫换速开关时,PLC内部锁存继电器得电吸合,定时器Tim10、TiM11开始定时,其定时的时间长短可视端站层距和梯速设定。上强迫换速开关动作后,电梯由快车运行转为慢车运行,正常情况下,上行平层时电梯应停车。如果轿厢未停而继续上行,当Tim10设定值减到零时,其常闭点断开,慢车接触器和上行接触器失电,电梯停止运行。在骄厢碰到上强迫换速开关后,由于某些原因电梯未能转为慢车运行,及快车运行接触器未能释放,当Tim11 设定值减到零时,其常闭点断开,快车运行接触器和上行接触器均失电,电梯停止运行。因此,不管是慢车运行还是快车运行,只要上强迫换速开关发出信号,不论端站其他保护开关是否动作,借助Tim10和Tim11均能使电梯停止运行,从而使电梯端站保护更加可靠。
b. 当电梯需要下行,只要有了选梯指令,下行方向继电器得电其常开点闭合,锁存继电器被复位,Tim10和Tim11均失电,其常闭点闭合为电梯正常下行做好了准备。下端站的保护原理与上端站保护类似不再重复。
c. 楼层计数采用相对计数方式。运行前通过自学习方式,测出相应楼层高度脉冲数,对应30层电梯分别存入30个内存单元DM06~DM21。楼层计数器(CNT46)为一双向计数器,当到达各层的楼层计数点时,根据运行方向进行加1或减1计数。运行中,高速计数器累计值实时与楼层计数点对应的脉冲数进行比较,相等时发出楼层计数信号,上行加1,下行减1。为防止计数器在计数脉冲高电平期间重复计数,采用楼层计数信号上沿触发楼层计数。
d. 当高速计数器值与快速换速点对应的脉冲数相等时,若电梯处于快速运行且本层有选层信号,发快速换速信号。若电梯中速运行或虽快速运行但本层无选层信号,则不发换速信号。
e. 门区信号;当高速计数器CNT47数值在门区所对应脉冲数范围内时,发门区信号。
5 软件设计特点
根据电梯所处的位置和运行方向,在编程中,采用了四个优先级队列,即上行优先级队列、上行次优先级队列、下行优先级队列、下行次优先级队列。其中,上行优先级队列为电梯向上运行时,在电梯所处位置以上楼层所发出的向上运行的呼叫信号,该呼叫信号所对应的楼层静磁栅源存放的寄存器所构成的阵列。上行次优先级队列为电梯向上运行时,在电梯所处位置以下楼层所发出的向上运行的呼叫信号,该呼叫信号所对应的楼层静磁栅源存放的寄存器所构成的队列。控制系统在电梯运行中实时排列的四个优先级陈列,为实现随机逻辑控制提供了基础。
采用先进先出队列,根据电梯的运行方向,将同向的优先级队列中的非零单元(有呼叫时此单元为七零单元,无呼叫时则此单元为零)送入寄存器队列(先进先出队列FIFO),利用先进先出读出指令SFRDP指令,将FIFO第一个单元中的数据送入比较寄存器。
采用随机逻辑控制,当电梯以某一运行方向接近某楼层的减速位置时,判别该楼层是否有同向的呼叫信号(上行呼叫标志寄存器、下行呼叫标志寄存器、有呼叫请求时,相应寄存器为l,否则为0),如有,将相应的寄存器的脉冲数与比较寄存器进行比较,如相同,则在该楼层减速停车:如果不相同,则将该寄存器数据送入比较寄存器,并将原比较寄存器数据保存,执行该楼层的减速停车。该动作完毕后,将被保存的数据重新送入比较寄存器,以实现随机逻辑控制。
6 结束语
采用三菱FX2系列PLC控制静磁栅位移传感器实现电梯平层控制。可实现电梯控制的智能化,电梯运行舒适感好,启动、减速、平层的舒适感不因轿厢负载的变化而变化,取得了令人满意的效果。





