・上一文章:无需光耦合器的反激式 DC/DC 控制器可惠及视频安保
・下一文章:基于FPGA的数字磁通门传感器系统设计和实现
3 惯性测量系统软件设计
3.1 总体设计
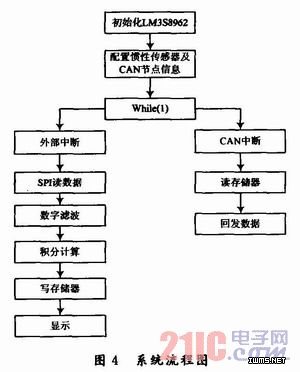
微控制器直接控制惯性传感器的工作状态并采集角速度、角加速度等信息,为了达到处理的实时性,当ADIS16365有数据需要发送时,中断通知微控制器进行读取。微控制器将采集到的数据进行积分及滤波处理,并将处理后的信息存储在片内FLASH中。当微控制器接收到数据请求时,通过CAN总线发送数据。图4为系统主流程图。
3.2 数据采集设计
微控制器通过SPI模式3与惯性传感器通信,在时钟下降沿时建立数据,上升沿时读取数据。图5为通信时序图。
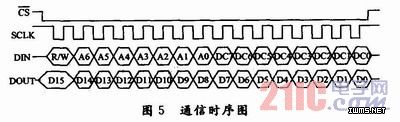
从图5可以看出,一个SPI传输包有16位。由于LM3S8962是32位处理器,因此每次可以传输一个SPI传输包。传输包高字节包括1位的读/写状态位和7位寄存器地址信息,低字节为读/写寄存器数据。ADIS16365的内部寄存器为16位,拆分为2个8位,分为高低地址,因此读/写操作都需要2个传输包。如果是写操作,则第一个传输包的高字节说明寄存器的低8位地址,低字节为写入寄存器低8位的值,第二个传输包则相应地写入寄存器的高8位;如果是读操作,则第一个传输包的高字节说明寄存器低8位地址,低字节无效,寄存器的值出现在第二个传输包。
ADIS16365拥有较为完善的数据处理方案,经测试,使用其内部校正功能可以明显改善系统性能。根据写入GLOB_CMD寄存器命令的不同,可以采用不同的处理方法。表1和表2列出了内部普通校准和精确校准与未校准数据的比较。

3.3 CAN总线节点设计
控制器区域网(CAN)总线属于现场总线范畴,它是德国Bosch公司为解决现代汽车中众多测试与控制仪器的数据交换而开发的串行数据通信协议。经过多年的应用发展,CAN以其极高的可靠性、实时性和灵活性而广泛应用在各种领域。鉴于此,该系统采用CAN协议来完成数据的交换。
CAN2.0B协议规定了4种帧类型:数据帧、远程帧、错误帧和过载帧。其中数据帧将数据从发送器传输到接收器,远程帧用于请求具有同一标志符的数据帧。CAN协议没有规定地址的概念,所有数据传输均基于报文标识符,当总线上出现一个报文时,所有节点的CAN验收滤波器将该报文的标识符与自身的验收代码寄存器和验收屏蔽寄存器比较,来决定是否接收该报文。因此,该系统将惯性传感器数据标识为“GY-Rn”,其中n为接收端编号,对于扩展帧的29位标识符而言,除去前缀“GYR”24位外,最多可以有32个接收端,满足一般系统需求。为使LM3S8962的CAN模块能响应所有数据请求,只需将验收屏蔽寄存器的后5位置1即可。当接收端n需要数据时,发送标识符为“GYRn”的远程帧,LM3S896 2的CAN模块在接收到之后从内部FLASH中读取数据,再回发相同标识符的数据帧完成通信。
4 结语
这里所设计的惯性系统主要采用MEMS器件ADIS16365,测量目标的三种角速度。采用含CAN控制器的LM3S8962微控制器进行控制,只需很少的外围器件即获得了优异的性能。结构简单、体积小,使用方便,具备较强的使用性。





