・上一文章:面向动态应用的灵活操作系统
・下一文章:基于DSP和FPGA的多波形雷达回波中频模拟器实现
控制器上运行的为ESP控制算法。控制器通过接收各种传感器的信号,判断车辆状态是否为危险工况,如果检测到危险,就会输出控制指令给执行器,通过电机和电磁阀的动作来对制动系统进行主动干预,同时通过CAN通信发指令给发动机管理系统,控制车辆驱动,从而化解危机。考虑试验台的兼容性,控制器部分可以采用NI cRIO作为控制器,并采用第一代ESP控制器(主控芯片为C167),也可以采用第二代ESP控制器(主控芯片为XC164)。
仿真结果
将仿真结果与实车试验结果相对比,两者吻合程度很好,说明该硬件在环仿真平台能有效地对车辆运动状态进行仿真。该仿真平台的搭建可以加速ESP控制算法的开发。
图4为在某种参数下测试ABS功能的一组轮速数据,和实车试验结果很类似,说明仿真平台精度很高。
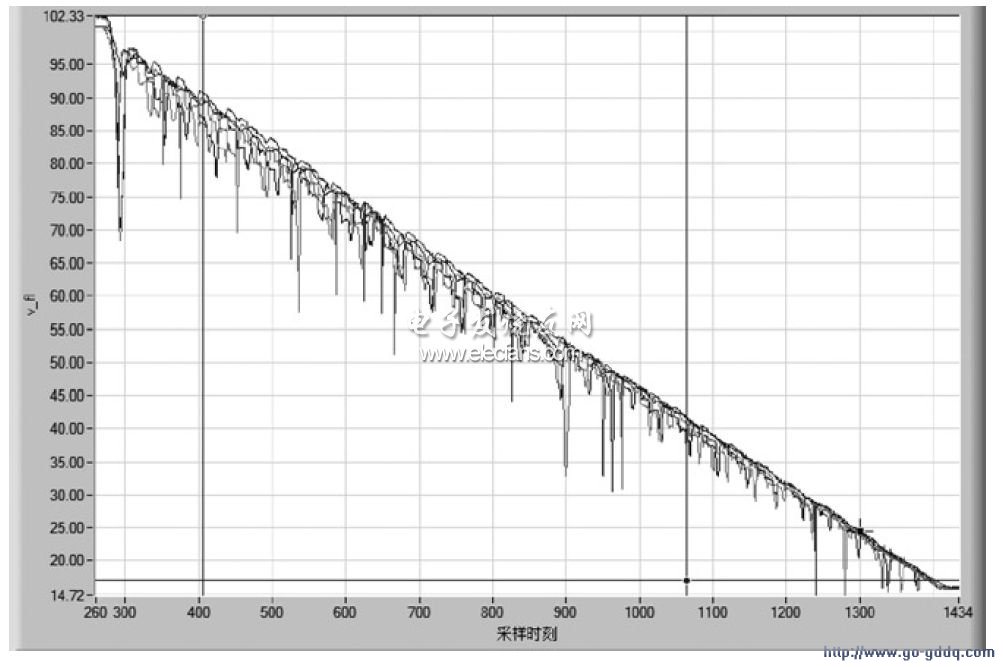
图4 某种参数下测试AVS功能的一组轮速数据
结论
本文基于PXI和cRIO搭建了ESP硬件在环仿真平台。平台可以将控制器放在仿真回路中,方便对控制器中的算法进行测试。仿真试验台的搭建提高了ESP控制算法的开发速度。





