・上一文章:基于FFT的DSSS序列偶捕获
・下一文章:用LabVIEW FPGA模块实现不同时钟域的数据连续传输
2.4 量程设置模块
本装置预设远距、中距、近距三个量程用来控制报警的距离,系统初始报警距离为近距1 m,按中距和远距按键可分别将初始报警距离设为3m和6m。
2.5 太阳能供电模块
通过太阳能光伏电池发出的直流电驱动系统,并以可充电的镍氢电池作为积蓄太阳能发电板的剩余电力的设备。太阳能供电模块由太阳能电池、太阳能控制器、蓄电池和DC-DC转换器等组成,如图6所示。太阳能控制器可以控制蓄电池对太阳能的采集和储存的工作状态,并对蓄电池起到保护作用,延长蓄电池使用寿命。

3 算法设计与实验结果分析
3.1 算法设计
本装置软件的控制核心为AT89S52单片机,单片机通过读取量程设置值和温度值对初始设置状态进行修改,控制发射超声波,同时启动定时器计时,为了避免接收传感器直接接受发出的超声波,可在发射超声波后设置一段延时。当超声波探测器探测到回波时,计时器停止计时,读取时间差,根据回波测距原理计算出障碍物距离,并执行报警程序,程序流程图如图7所示。由于采用的是12 MHz的晶振,计数器每个计数就是1μs,当主程序检测到接收成功的标志位后,将计数器T0中的数(即超声波来回所用的时间)按式(3)计算,即可得被测物体与测距器之间的距离S,假设温度为20℃,则对应声速v为344m/s,则有:
S=(v·△t)/2=172 T0/10 000cm (3)
3.2 实验结果分析
试验中选用一纸箱作为障碍物,将报警模块换为液晶显示器进行定量测量,不同气温下在同一点位置测量5个值,添加温度补偿和量程选择,得到如表1所示结果。
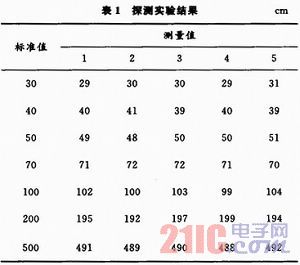
由此可以看出,本实验的相对误差较小,但是由于盲区的出现,所测的结果不能与标准值完全相等。并且当障碍物距离比较近时,测量精确性较高;障碍物较远时,精确性相对较低;这是由于距离较远时,超声波回波信号较弱,噪声较大,容易产生误差。
4 结语
目前导盲器的研究较多,本实验提出的设计方案特点是以太阳能作为系统的动力来源,采用半导体数字温度传感器实现对单片机超声波测距系统的温度测量和补偿,从而对声速进行补偿,对引起测量误差的因素进行修正处理,可以提高导盲器的导盲精度及灵敏度。由于预留了单片机引脚,便于进行功能拓展,同时导盲器系统以模块化进行组装,适宜增加其他功能模块。例如可以添加GPS定位器,可以帮助盲人家属及时了解盲人的行踪,避免盲人走失。而且本设计具有操作简便、体积较小等优点,因此可以很好地应用于实际生活中。





