・上一文章:高精度热插拔和电源监控
・下一文章:基于DSP控制的数字移相器―变压变频器模块的设计
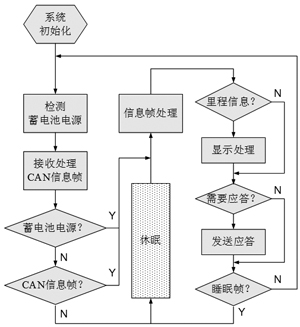
图3 基本软件
为了达到连续背光控制,LED的亮度是通过一个可变电阻来设置参考电流。图4给出了ST2225A的接口电路图。由于要显示的内容较多,总共需要驱动82个LED灯。而ST2225A只有35个输出端,因此必须利用其中几个引脚做公共端,采取分时扫描的驱动方式。但是公共端越多,输出占空比越小,LED灯的亮度会受到一定影响,所以公共端不能太多。经过试验验证,3个公共端对LED灯的亮度没有太大影响,为了使LED灯保持原有亮度,可以适当加大供电电压。
③ 软件流程
在系统启动后,屏幕显示提示信息,用户输入时间,日期信息确认后显示屏开始显示日期信息,此时汽车显示速度为零。汽车启动后系统实时显示经过处理的近似车速和已经行驶的里程信息。在行驶的过程中,系统通过解析车身总线发送来的CAN信息帧进行汽车的里程计数,单片机利用定时中断定期对计数值进行统计计算,从而得到速度等信息,程序不断将速度值和门限值进行比较,如果超过给出报警提示。
总结
本文主要讨论了车载抬头显示的基本实现框架和实现所需的主要元器件,着重讨论了CAN总线接口、显示屏控制器接口和电源接口的设计与实现。通过实际工程化论文中所提出的设计方案,证实其具有可实现程度高、成本低、效果好等优点。





