・上一文章:DSP的双电源解决方案
・下一文章:一种实用型的ATX电源设计
系统软启动的控制功能通过比例积分微分控制器实现。通过比较给定信号与反馈信号的偏差, 并进行比例、积分、微分等运算进行控制, 是技术较成熟、应用、广泛的一种控制方式。其结构简单、灵活性强、系统参数调整方便, 不需要求出模型。
PID 控制原理如图2 所示。PID 控制是一种线性调节器, 它把设定值W 与实际输出值相减, 得到控制偏差e .偏差值e 经比例、积分、微分后通过线性组合构成控制量U, 对对象进行控制。其中比例调节器起到基础调节作用, 主要对控制系统的灵敏度和控制速度有影响。积分调节器可以自动调节控制量, 消除稳态误差,使系统趋于稳定。微分调节器可以减小超调, 克服振荡, 同时加快系统的稳定速度, 缩短调整时间, 从而改善系统的动态性能。
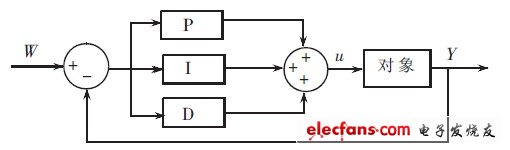
图2 PID 控制原理图
PID 控制器的输出与输入之间的关系可表达为:

式中: Ti为积分时间常数; Td为微分时间常数; Kp为比例系数; Ki为积分常数, Ki=Kp/Ti ; Kd为微分常数,Kd=Kp/Td.
系统启动时间较短, 启动电压、电流较大, 负载所承受的冲击也较大, 致使启动阶段负载的动负荷峰值远远大于正常运行时的负荷, 容易造成负载的损坏。为解决此问题, 设计了一种新型的PID 控制软启动电源系统, 主要由电源、大电流恒流源、输出大电流端采样和控制系统组成, 并完成了实验室内的试验。当电源启动时, 首先由单片机系统给定设定电压、电流或功率。PID软启动是按负载线性上升的规律控制输出。在负载电压线性增加的过程中, 如果电流超出了所限定的范围, 则马上投入电压闭环, 使电流值限定在所设定的范围内后, 再线性逐渐增加电压至额定值, 系统的光强也由零逐渐增大, 完成启动过程。
PID 控制系统软启动效果图如图3 所示。通过串行通信端口com1 通信, 电压单位mV、电流单位mA, 功率单位mW, 时间单位s.
从图3 的软启动效果图可以看出, 在恒定电压、电流、功率的模式下工作时, 系统开机过程超调量很小, 有效地控制了启动过程, 防止了启动过程产生过大的扰动电压, 产生过大的功率, 有效地保护了负载。






