・上一文章:断电延时继电器原理与实现
・下一文章:用于医疗的幅相测量电路的实现
如图5 所示,AMR 是沿X 与Y 两个方向在ITO层蚀刻出一条一条平行排列的区块,相当于将整个触摸屏划分成很多小矩阵区块,每个小矩阵相当于一个小的模拟四线电阻式触摸屏,各个区块彼此独立。如图6 所示,当手指按压到对应的区块时,区块就会传出对应比例的电压,控制器接收到电压后再将其翻译成坐标信息。
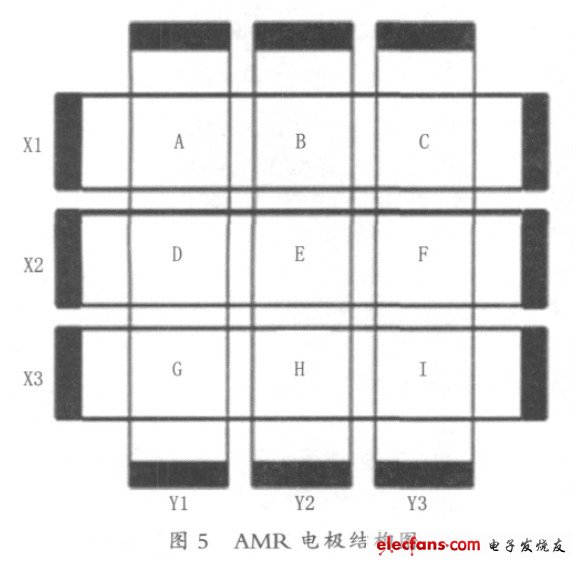
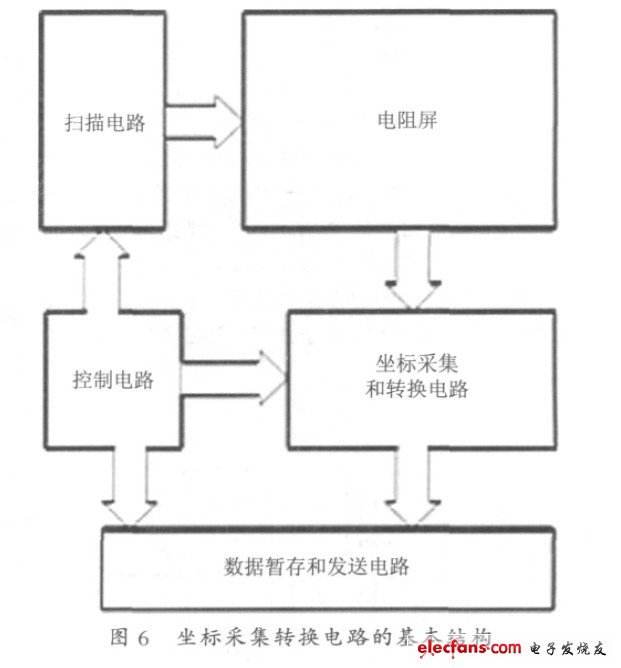
图5 给出了利用四线式电阻触摸屏实现多点触摸技术的方法:第一个时刻,在X1 电极上加上电压,由Y1、Y2、Y3 电极读取A、B、C 触摸单元所探测到的X 坐标;同理,在以后的各个时刻依次读取剩余触摸单元的X 坐标。获得所有触摸单元的X 坐标后,再依次给Y 电极加上电压,以获得各个触摸单元的Y 坐标。
模拟矩阵电阻AMR 与纯数字的DMR 技术多点触摸屏系统不同,AMR 是一个数字模拟混合系统,因此,在扫描电路、AD 转换电路、控制电路的基础上,还需添加各种辅助元件来减小外界噪声对模拟电路的干扰。特别是对于AD 转换,为了提高转换的精准度,有必要在硬件电路上添加下拉电阻,以避免无触摸发生时AD 输入端浮接的现象。
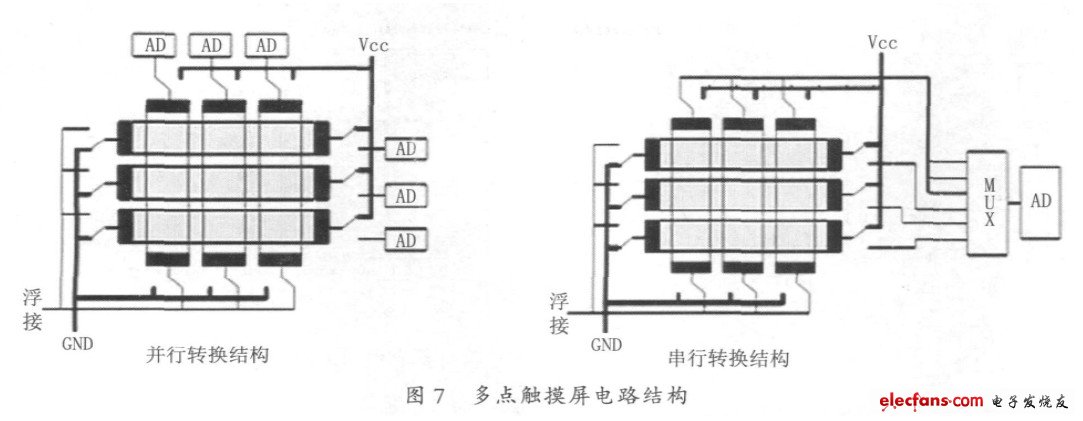
控制电路将控制扫描电路生成恰当的扫描信号,并使得AD 转换电路在恰当的时候进行数据采样和转换。对于AD 转换电路,可以在串行转换和并行转换间做取舍。串行转换结构简单,需要的AD 模块数量少,但是总的转换频率低;并行转换需要的AD 模块数量稍多,但总的转换频率可以得到提高。
于是基本电路构架便可以分为串行和并行两种,如图7 所示。值得注意的是,图6 仅表现了坐标采集转换电路的基本原理和结构,并没有画出为减小各种电器噪声而添加的元件,如AD 的下拉电阻、滤波电容等。
3.3 数字矩阵电阻DMR 技术
原理上,DMR 是将触控面板上下层划分成许多很小的区块,当某一区块被碰触,这一区块就会被启动开关,此时线路会发出指示开关的数字讯号传给控制器,控制器便能计算出触碰位置的坐标。
如图8 所示,8×8 数字电阻触摸屏, 基于ALTEra 解决方案[1]:它采用两层ITO 分别作为水平的sensing line(触摸感测线)和垂直的driving line(加电驱动线),driving line 和sensing line 之间的触点就相当于一个开关,在未接触时,它们之间是绝缘的,而接触发生后,两者发生短路,相当于开关闭合。驱动的时候,其中sensing line 通常由一个上拉电阻施加高电平,同时在driving line 上以一定频率依次在各列中施加负脉冲电压,这样当扫描到触点所在的那一列时,由于触点开关闭合,形成直流通路,使得触点所在行的电压被拉低,形成一个负脉冲,这样就检测到了触点的位置。由于driving line 是依次扫描,所以可以检测到多个触点的位置。
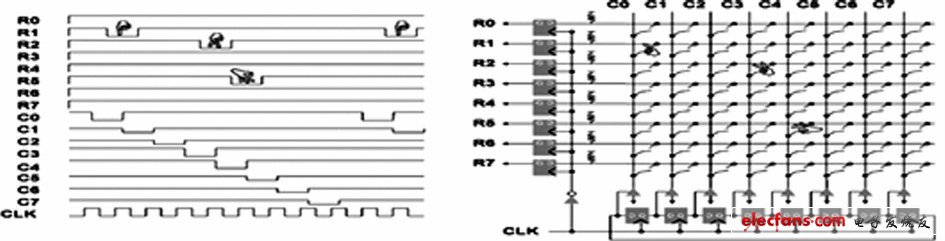
图8 触摸解码的工作模式
数字矩阵电阻DMR 其实就是一个开关网格,由于各个开关节点彼此独立识别,所以互不干扰,可以实现真正意义上任意多点的多点触摸。横向数据的并行写入以及不需要AD 转换,极大地提高了触摸屏的工作速度。但是,数字矩阵电阻DMR 需要众多的电极和端口,导致其成本远高于模拟矩阵电阻AMR,故仅适用于对系统可靠性和工作速度有特别要求的应用场合。





