・上一文章:显示译码器
・下一文章:JPEG2000的近距离无线视频传输系统设计
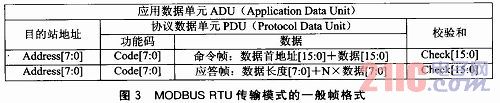
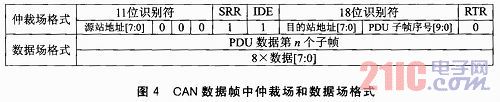
在工业以太网平台,智能测控节点和上位机连接使用TCP方式,TCP帧数据直接使用表1中的MODBUSADU;在CAN网络平台,由于使用多主短帧方式,CAN数据帧仲裁场18位扩展识别符写入目的站地址和PDU子帧序号,数据场写入PDU的8字节子帧,以适合CAN数据帧的合并和拼接,数据格式如图4所示。
4 实验结果
本文使用Matlab软件对用PPTs衡量网络质量以实现自动投切的冗余算法进行仿真。由于以太网络的数据包产生网络延时的分布符合Pare to分布,其突发序列长度的性质具有自相似特征,我们可以使用Pareto分布建立的自相似模型进行网络仿真分析。本文使用Matlab7.1中GP RND()函数随机生成的数据,满足Pareto分布(x=0.3,k=0.82,θ=σ=1),Paret0分布的PPT样本值如图5所示。图6是使用式(3)计算后的仿真结果(σ=0.25)。
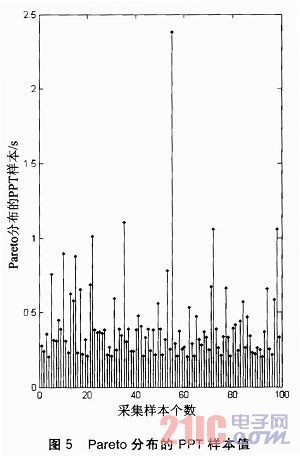
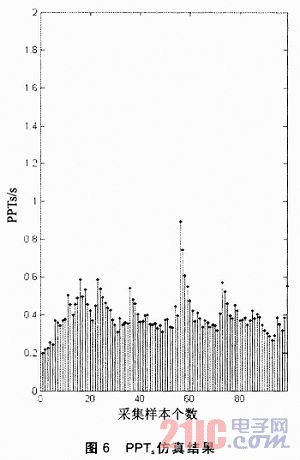
图5和图6的每个样本采集的时间间隔为0.2 s,第55个时间单位的时间间隔的PPT=2.380 8s,数据传输时间间隔过长,超过连续12个命令帧无响应,使得PPTs>0.8时认为通信链路断开;第22、35、72、98个时间单位的PPT虽然都大于1 s,但是随后的命令帧有响应,能快速恢复;PPTs<0.8时网络能自动识别链路没有断开。因此,用式(3)、(4)计算和判定网络链路状态,稳定性较好。
结语
本文设计了一种多网络融合的水厂自动化控制系统,自动化系统的工业以太网络平台可融合安防系统等。该系统节点提供了多网络接口与智能仪表或设备互连,并给出以太/CAN网自动投切的算法和异构网络的数据帧协议。
仿真实验表明,以太/CAN网冗余算法能很好地识别网络链路状态和衡量网络质量。
该系统通信质量高,抗干扰能力强,可靠性好,可集成度高,组态灵活,有着良好的应用前景。





