・上一文章:平面变压器的特性及标准化设计
・下一文章:一种新颖的电容降压型直流稳压辅助电源
伺服电机不像CD电机那么简单,把电池接到引线上就会旋转。要转动伺服电机的输出轴,需要正确的电子装置接口。虽然用接口电子装置可能对伺服电机应用比较复杂,但是实际上这种电子装置是比较简单的。如果打算用PC机或微控制器(例如BasICStamp)去操纵伺服电机,为此只需少量软件程序。
若DC电机已和计算机接口,一般地就需要功率晶体管、MOSFET或继电器。而伺服电机可以直接耦合到PC机或微控制器上,而不要附加电子装置。在伺服电机控制板上涉及所有电源问题要十分小心,以免引起麻烦。在计算机控制机器人的伺服电机应用中这是一个关键。
1、555定时器控制伺服电机
当不想用计算机控制伺服电机,可用555定时器IC去给伺服电机提供所需的脉冲。下图表示用555定时器控制伺服电机的一般方法。在工作过程中,555产生占空比变化的信号脉冲,该脉冲去控制伺服电机运行。调节电位器去确定伺服电机的位置。因为555能产生持续时间很短和很长的脉冲,这就可能使伺服电机接受指令运行在超越它的正常两端位置上。

如果伺服电机撞击它的缓冲器,引起振动,应立刻切断电源!如果不这样,伺服电机内的齿轮可能破碎,因而要么扔掉伺服电机,要么更换齿轮。
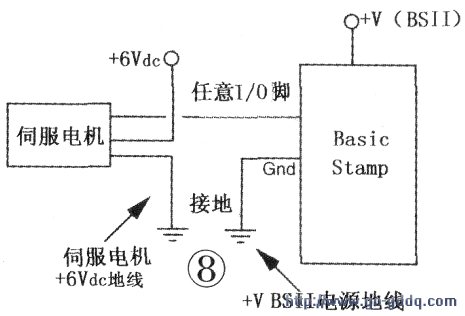
2、借助微控制器BASICSTAMP控制伺服电机
BasicStamplI是应用广泛的微控制器,能和各种机器人部件接口,包括伺服电机。
Stamp能直接控制一个或多个伺服电机。然而控制的伺服电机越多,发送脉冲到每一个部件所需的处理时间越长。
下图表示标准伺服电机连接到BasicStamp‖的电路图。注意,对伺服电机供电不是来自BasicStamp‖,或别的实验板。伺服电机需要的电流比Stamp能给出的要大。一组4节AA电池供给伺服电机是足够的。要正确工作,在Stamp与电池组之间必须连接好地线。在+V和AA组之间连接一只33~47μF的电容器,可滤除噪声,这种噪声在伺服电机接通或关断时可能感应到电子装置里。