・上一文章:高功率因数的大功率开关电镀电源研究
・下一文章:基于LM3423的太阳能LED路灯驱动器的设计
而一旦协调器启动PAN, 便允许路由器和终端设备结点加入PAN.作为ZigBee终端设备的车载终端加入PAN时, 系统将收到一个16位的网络地址, 同时发送和接收来自作为ZigBee协调器的电子站牌终端的数据。PAN协调器的网络地址总是0.由于站牌上ZigBee模块的网络物理地址是唯一的, 故可通过物理地址向站牌发送信息。
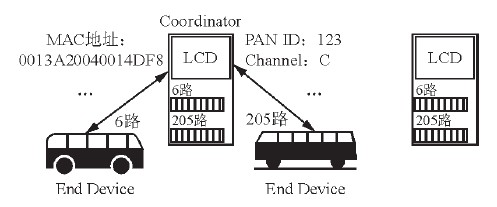
图5 公交车与站牌组网方式
3.2 ZigBee模块的API操作
XBee Pro具有空模式、接收模式、发送模式、睡眠模式和命令模式等5种操作模式。对于每一种操作模式, 还有透明方式和应用程序接口(API) 方式两种操作方式。当工作在透明方式时,模块可替代串口线的作用, 并以字节为单位操作各种信息; 而当工作在API 方式时, 所有进出模块的数据均被包含在定义模块的操作和事件的帧结构中。本文采用API操作方式。
API操作要求模块之间通过一种结构化的接口进行通信(数据通过一种定义好序列的帧来交互通信)。API对通过串口数据帧进行命令发送、命令响应, 以及模块状态信息的传送与接收作了规定。
(1) ZigBee发送请求
公交车到达站牌后, 应根据站牌的MAC地址将日期、时间、车号、公交线路、车内人数、行驶方向等信息发送到电子站牌。公交车ZigBee模块发送模式的API帧结构定义如图6所示。其中的Bytes6-13为站牌的MAC地址。 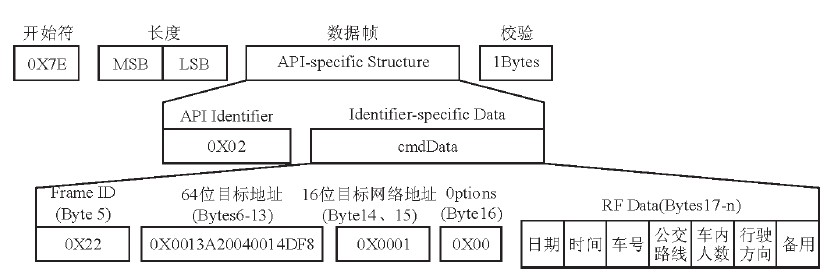
图6 公交车TX请求API帧结构图
(2) ZigBee发送状态。
为实现可靠传输, 当公交车传送信息给电子站牌的请求完成后, 必须得到电子站牌的确认信息, 因此还必须得到电子站牌回馈给公交车的发送状态信息。这个信息将指出数据包是否被成功发送, 或者发送失败。如果发送失败必须重新发送公交车的信息, 直至发送成功。
电子站牌根据公交车的MAC地址, 不断的向PAN内发送信息, 并通过回读发送状态来确定是否有公交车加入网络, 如果有, 则根据网络地址识别公交车, 并将公交车的定位信息发送到监控中心, 从而实现对GPS定位方式的补充。 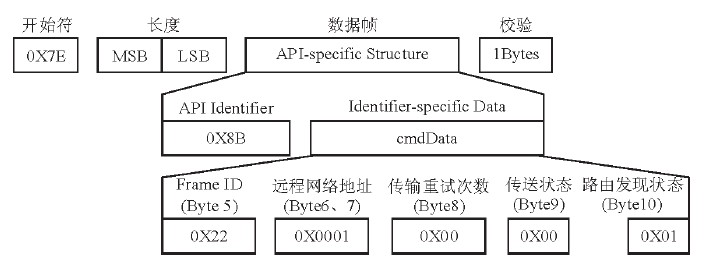
图7为公交车ZigBee模块的TX状态帧结构
其中的Bytes 9为传送状态信息, Bytes6、7为接收模块的16位网络地址。
(3) ZigBee接收包。
电子站牌收到公交车发来的状态信息数据包后便进行解析, 并通过站牌的GPRS模块发送到监控中心。电子站牌ZigBee模块接收模式的API帧结构定义如图8所示。图中的Bytes5-12为公交车的MAC地址。
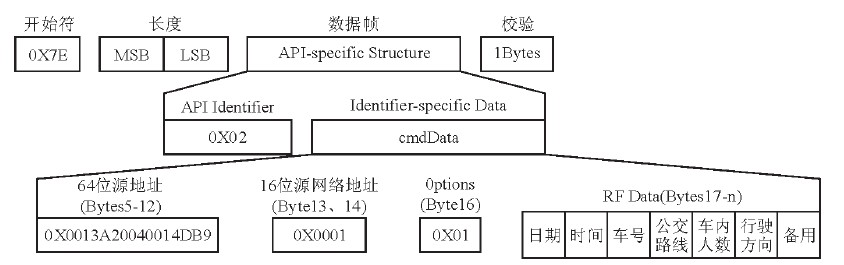
图8 电子站牌RX的API帧结构图
3.3 GPRS网络通信设计
电子站牌收到公交车发来的信息后, 将通过GPRS-DTU发送到监控中心, 然后由监控中心将所有公交车发来的信息通过Internet发送给站牌。
GPRS DTU有透传模式、AT+i命令模式、自动IP注册模式、远程维护和流控五种模式。在系统的电子站牌终端中, DTU将使用透传模式与服务器进行信息的交互。通过透传模式可将电子站牌异步串口通信转换成基于TCP/UDP协议的网络通信。其主要目的是通过串行通信的简单设备实现在IP网络上的通信, 而数据格式不发生任何改变。这一点非常重要, 由于数据格式在经过DTU前后均不发生任何变化, 由此, 电子站牌原有的设备及软件不用作任何升级, 就可直接应用。
DTU的透传模式可使电子站牌客户端在发起通信请求时, 使DTU必须与服务器建立网络连接。也就是说, 电子站牌下位机与服务器进行数据传输时, 首先是电子站牌下位机要与DTU设备的串口相连, 在DTU进入透传模式后自动被调用, 并与服务器建立网络连接, 当网络连接建立后, DTU将自动完成串口到网络通信的转换, 以便所有数据可透明地在服务器软件与电子站牌下位机之间双向传输。
服务器与电子站牌终端通信可通过套接字socket 来实现。首先在服务器上建立一个监听Socket对象, 并绑定在一个固定端口上, 然后,每当电子站牌客户端发送一个SOCKET连接请求,服务器端就会新开启一个线程, 并在其中创建一个socket与电子站牌客户端的socket通讯, 直到电子站牌客户端程序关闭, 该线程结束, 然后服务器主线程的socket在应用程序退出时关闭。通过多线程的Socket程序设计, 可以实现一个服务器与多个电子站牌客户端的通信。
以下是服务器基于socket多线程的具体实现程序代码:
DWORD WINAPI AnswerThread ( LPVOIDlparam) //收发线程入口
{//创建线程时把服务器建立的新套接字传给lparam
SOCKET ClientSocket = ( SOCKET) ( LPVOID)lparam;
int bytesRecv;char sendbuf [ 32] = “ ” ;char
recvbuf [32] =“” ;
while (1)
{bytesRecv=SOCKET_ERROR;
for ( int i =0;i 《 ( int) strlen ( recvbuf) ;i ++ )
{recvbuf [i] =‘’;}
while (bytesRecv==SOCKET_ERROR)
{ bytesRecv =recv ( ClientSocket,recvbuf,32,0) ;} //⑤接收电子站牌客户端的数据
…
send ( ClientSocket,recvbuf,strlen ( recvbuf) ,0) ; //⑥向电子站牌客户端发送数据
}
}
…
WSAStartup (MAKEWORD (2,2) ,&wsaData) ;//初始化Winsock
socket ( AF_INET,SOCK_STREAM,IPPROTO_TCP) ;//①创建一个监听socket
bind ( m_socket, ( SOCKADDR*) &servICe,sizeof(service)) //②绑定套接字
listen (m_socket,20) //③监听套接字
SOCKET ACCeptSocket;
while (1) //一直等待客户端的请求, 请求到来后,建立新的连接套接字
{ AcceptSocket=SOCKET_ERROR;
while (AcceptSocket==SOCKET_ERROR)
{ AcceptSocket =accept ( m_socket,NULL,NULL) ;} /*④等待客户请求到来,请求到来后,接受连接请求, 返回一个新的对应此次连接的socket*/
hThread =CreateThread ( NULL,NULL,AnswerThread, ( LPVOID) AcceptSocket,0,&dwThreadId) ;} /*创建新线程, 将新的连接套接字传给AnswerThread入口函数*/
}
4 结束语
本系统中, 公交车与电子站牌通过ZigBee网络实现信息交互, 电子站牌与监控中心通过GPRS网络实现信息交互。公交车上用价格低廉的ZigBee模块取代现有智能公交系统中的车载GPRS模块, 可节约硬件成本, 而公交车与电子站牌之间的ZigBee网络通信则可实现公交车的定位, 以作为GPS定位的补充, 从而增加了系统的可靠性。
今后, 随着3G、WiMAX、Wi-Fi等无线通信技术的成熟以及更加优化的卫星定位技术的出现, 定会出现越来越多的智能公交系统方案, 从而在更大程度上推动智能公交系统的发展。





