・上一文章:一种WLAN自动化测试平台的设计及实现
・下一文章:嵌入式组合控制直线一级倒立摆系统

3 倾角传感器数据采集与滤波处理
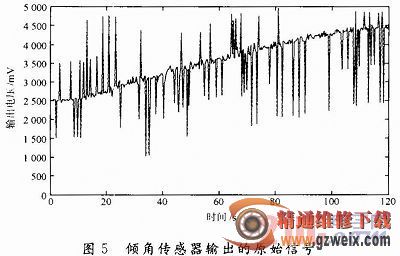
本文中,每隔300 ms采集一次倾角传感器输出电压,电池板从0°匀速转到90°后得到的数据如图5所示。图中x轴表示电池板转动90°所用的时间,y轴为对应时间下传感器输出的电压值。图5中所示的传感器输出电压信号显然不能作为电池板的角度信号反馈给MCU,否则可能会导致俯仰方向上驱动电机的误动作,产生意想不到的后果,因此需要进行滤波,去除毛刺信号。
设倾角传感:器输出电压值为xi,则每N组数据进行平均后,得到平滑后的输出值为:

如果N取值很大,输出信号的平滑度则很高,但是会降低灵敏度,且还受到本文中所选择单片机RAM的大小的限制;N取值很小则又达不到滤波效果。实验验证,本应用中N取20可得到很好的滤波效果。
由图5可以看出,输出信号脉冲干扰信号很多,所以必须要做限幅处理。限幅滤波设置一个阈值,如果前后两次输出值的差值小于等于这个阈值时,本次值有效;相反则舍弃本次值,同时用上次值代替本次值。本文依据太阳初升及落山时刻,电池板初始对准及回收动作下的电压变化最大幅值设置阈值。可算得其最大转动速度为0.75°/s,则对应的输出电压最大差值应该为25mV。
本方法有效地结合了限幅滤波和算术平均滤波各自的优点,先利用限幅滤波算法去除了超出阈值的无效脉冲数据,再使用算术平均滤波平滑输出信号,输出信号效果图如图6所示。
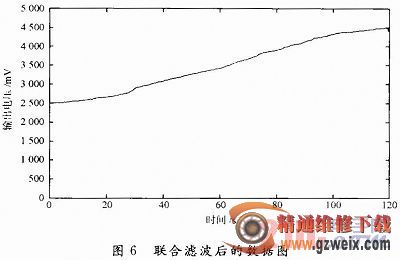
可以看出,其平滑度有了很大的改善,满足了控制系统的要求,表明了此联合滤波算法的应用是有效的。
4 结语
本文研究了倾角传感器在太阳能跟踪发电系统中的应用,设计了模块的硬件电路,根据本应用环境的因素,利用两种滤波方法的优点对输出信号进行了处理,达到了理想的输出效果,精确地反馈了太阳能电池板俯仰角度,使得对太阳的跟踪实时有效,提高了太阳能电池板的接收效率。





