K1=(Read_x[1]-Read_x[0])/Set_X[1]-Set_x[0]);
K2=(Read_X[3]-Read_X[2])/Set_X[3]-Set_x[2]);
KX=(K1+K2)/2; ∥对两次运算的值求平均得到最终的X比例系数

求得比例系数后,再以设置的第5点作为基准点(Set_X[4]),这样就可求出任意触摸点的物理坐标:
X=(ReadX-Read_X[5])/KX+Set_X[4];
同理,也可求出Y轴的物理坐标。
2.2 Modbus通信协议
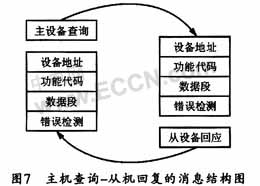
本系统采用Modbus作为手柄控制器与核心板之间的通信协议。Modbus通信使用主-从技术,即仅一设备(主设备)能初始化传输(查询),其它设备(从设备)根据主设备查询提供的数据作出相应反应,主机查询和从机回复的消息结构如图7所示。主设备可单独和从设备通信,也可以广播方式和所有从设备进行通信。如果单独通信,则从设备返回一消息作为回应;而如果是以广播方式查询。则不作任何回应。Modbus协议建立了主设备查询格式,包括设备(或广播)地址、功能代码、所有要发送的数据错误检测域。从设备回应消息也由Modbus协议构成,包括确认要行动的域、任何要返回的数据、和错误检测域。如果在消息接收过程中发生错误,或从设备不能执行其命令,那么,从设备将建立一个错误消息并把它作为回应发送出去。
Modbus协议有ASCII和RTU两种传输模式,但在同一个Modbus网络上的所有设备都必须选择相同的传输模式和串口参数。本设计采用RTU模式,即在消息中的每8 Bit字节都包含两个4 Bit的十六进制字符,因而在同样的波特率下,可比ASCII方式传送更多的数据。RTU模式的消息结构如图8所示。当手柄控制器检测到有按键被按下时,就将被按下键的键码按RTU消息帧的结构并通过串口发送给核心板。核心板接收到手柄控制器发送的信息后,首先进行CRC校验,校验正确后,核心板将根据键码进行相应操作,并且回应手柄控制器,若CRC校验出错,则核心板回应手柄控制器错误信息,从而完成一次通信后,系统便等待下一次通信。
3 结束语
本文所设计的人机接口通过实际使用证明其通讯稳定可靠,操作简单方便,完全可以满足医用数据采集系统的要求。并且该设计具有很强的移植性,可以根据使用系统的复杂性进行完善。因而具有相当广泛的使用范围。
上一页 [1] [2] [3] 下一页





