・上一文章:奇瑞艾瑞泽7e插电式混合动力模式定义
・下一文章:汽车倒车影像异常闪现故障排查及搭铁改进
摘要:本文设计基于主从通信模式的物流车远程参数存储与监测系统。主控制器采用STM32F2407,通过GPRS网络,将GPS模块接收的车辆位置信息和CAN总线采集的车辆实时运行数据发送到中心服务器上,可通过手机客户端或上位机查看数据。
汽车研发过程中,需要对各部件实时监测,用于分析汽车运行特性,从而得到最优的控制策略。笔者设计了基于ARM-STM32的汽车运行参数与远程传输系统,该系统不仅集成了先进的ARM处理器芯片、各类传感器模块、CAN通信模块、显示模块、GSM无线传输模块,而且配备了智能手机客户端,使得汽车运行参数得到远程实时监测及有效调控。该系统安全系数高,便于远程调控。
1 系统结构与功能
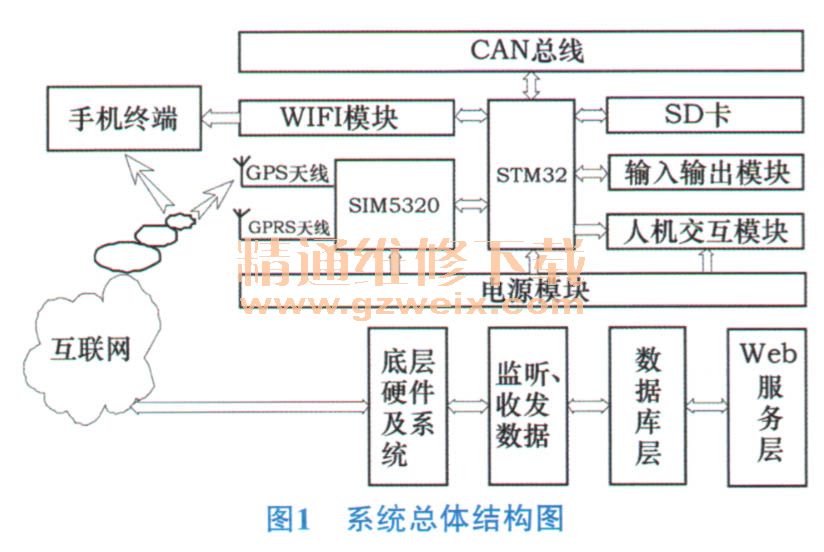
系统总体结构图如图1所示。车载终端由STM32单片机模块、无线传输模块、显示模块、WIFI通信模块、CAN通信模块、电源模块及手机信息接收端等部分构成。其中,无线传输模块采用芯讯通公司(SIMCom)生产的SIM5320芯片为主芯片,负责获取GPS位置信息并实现GPRS无线通信;显示模块采用2.8寸TFTLCD显示屏,其通过FSMC接口与STM32芯片进行数据传输;电源控制电路主要由供电电源、稳压芯片组成,选用5V的直流供电电源和精度较高的线性稳压芯片LM 1117-3.3,稳定输出3.3 V的直流电;WIFI通信模块与核心处理器采用USB接口连接,实现上位机、下位机之间无线通信;CAN模块通过CAN读取车辆实时信息;手机通过WIFI方便直观地观察车辆参数。上位机接收数据,并进行存储。此外,上位机可将数据或指令经互联网、GPRS网传到下位机,对汽车进行实时调控。
1.1上位机构成与工作原理
图2为上位机架构图。上位机任务包括2部分:数据服务器接收、解密并存储下位机发来的数据;Web服务器向合法用户提供数据服务。
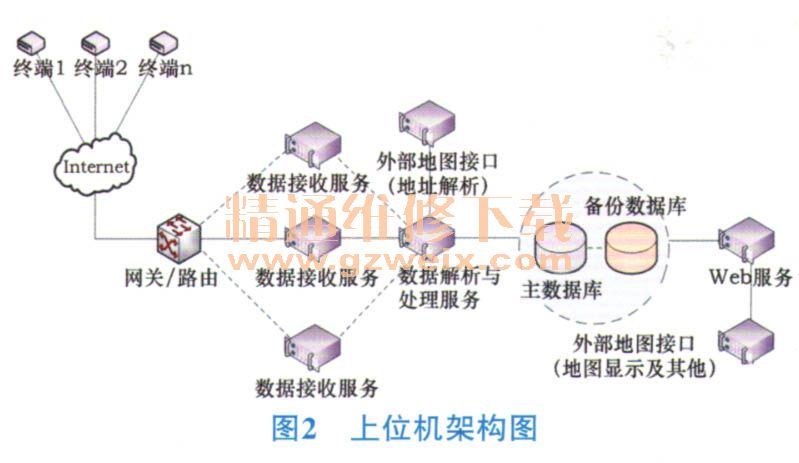
上位机采用WAMP(Windows+Apache+PHP+Mysgl)平台。应用Ajax技术实现页面无刷新地更新。
1.2车载终端组成及工作原理
车载终端是车辆远程数据采集系统的核心,用于数据的采集、处理、加密、封装、发送。如图3所示。
1) ARM核心处理模块ARM芯片具有体积小、成本低、功耗小、性能良好等诸多优点,在各行各业中得到日益广泛的应用。本系统采用STM32F4系列的STM32F407芯片,该芯片基于最新的ARM Cortex M4内核,在现有出色的STM32微控制器产品组合中新增了信号处理功能,并提高了运行速度;STM32F405x集成了定时器、3个ADC、2个DAC、串行接口、外存接口、实时时钟、CRC计算单元和模拟真随机数发生器在内的整套先进外设。STM32F407在STM32F405产品基础上增加了多个先进外设。
2)无线传输模块无线传输模块采用芯讯通公司生产的SIM5320,其采用SMT封装,支持AT指令。采用单电源供电模式,并且内置GPS和A-GPS。ARM芯片将SIM5320接收到的GPS信息与通过CAN接收到的车辆参数信息汇总、编码,将数据处理成TCP/UDP数据包并加上IP报头和报尾封装成IP数据报,并通过SIM5320发送出去。
3)人机交互模块检测终端的输出显示采用ALIENTEK推出的高性能4.3寸800×480像素,16位真彩电容触摸屏,I2C接口,支持5点同时触摸,具有非常好的操纵效果,且效应速度快,理论刷屏速度可达78.9帧/秒。
4)电源模块根据核心板的要求,电源模块提供2种等级的电压,LM2940CS稳压芯片输出5V直流电;AMS1117稳压芯片输出3.3 V直流电。
5) CAN总线通信模块车载终端通过STM32F407芯片自带CAN接口实时采集车辆参数,波特率取512 k。





