0 引 言
控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能。近几年来随着高性能微控制器和嵌入式系统技术的不断进步,为各类实时控制应用提供了解决方案。
嵌入式系统(ES)是计算机技术、通信技术、半导体技术、微电子技术、语音图像数据传输技术,甚至传感器等先进技术和具体应用对象相结合后的系统,其是硬件和软件紧密捆绑在一起的系统。将嵌入式系统应用于灭火机器人的设计中,对机器人的性能智能化、网络化、小型化都有了明显提高。
比赛用灭火机器人需要机器人有智能较高的自动控制性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
1 灭火机器人的描述
灭火机器人的外形结构如图1所示,它的主要构件有:红外发射传感器(6个),红外接收传感器(6个),声音传感器(1个),灭火风扇(前后各1个),远红外火焰传感器等(前后各7个)。其中红外发射和接受传感器的配合使用可以使机器人自动避障行走。远红外火焰传感器可以检测光的强弱,用于判断房间是否有火以及趋光灭火。声音传感器用于启动。基于实践,风扇灭火更为可靠,所以选用风扇灭火。

2 灭火机器人的总体设计
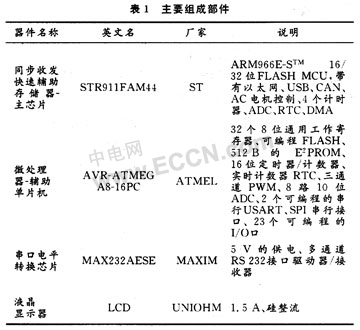
在智能灭火机器人系统中,首先要解决的是定位问题,故需要一个好的定位方案。所以,控制核心需要给传感器留足够的输入接口,同时也要有足够的输出接口用于控制外设。而速度对灭火机器人至关重要,在高速运动的情况下,需要CPU具有比较强的浮点数运算能力。基于上述考虑,选择ARM9为灭火机器人的控制核心,该控制器硬件功能齐全、功耗小、周边设备集成度高,是先进的智能机器人计算平台。它与其他的主要部件如表1所示,系统总体框架如图2所示。

3 灭火机器人嵌入式系统硬件设计
3.1 控制器系统设计
[1] [2] [3] 下一页





