・上一文章:基于C8051F330便携式生理参数监测仪设计
・下一文章:基于ZigBee无线传感网络的节水灌溉系统设计
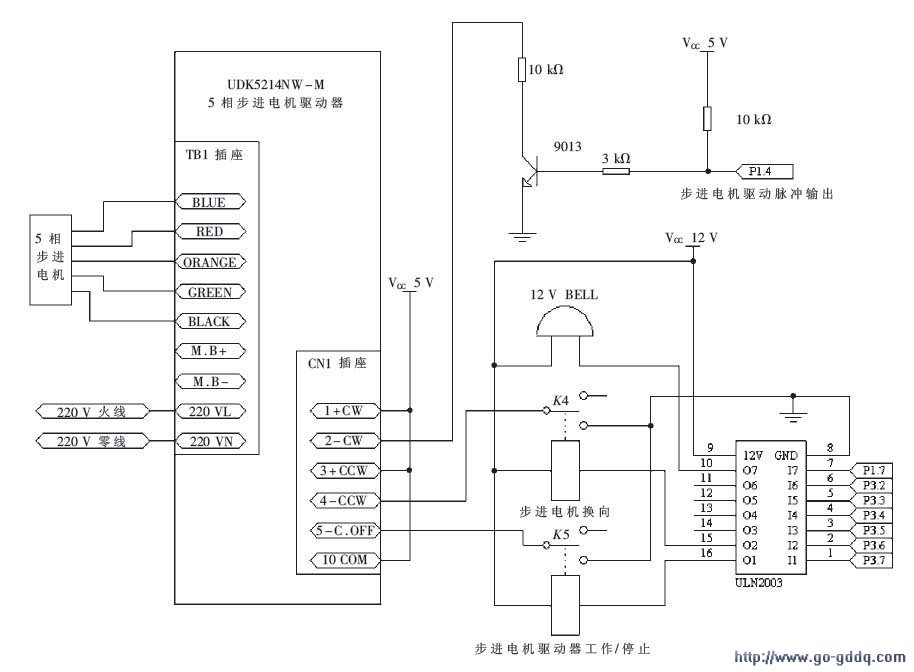
1.2 步进电机控制电路
步进电机驱动器采用HP公司生产的UDK5214NW-M5相步进驱动器,驱动器控制采用ULN2003芯片,该芯片的三个输出口分别用来控制步进电机换向控制继电器、步进电机驱动器工作停止继电器及报警工作,再通过继电器控制步进电机驱动器,该驱动器步进脉冲由单片机P1.4口输出,进而驱动步进电机。步进电机控制电路如下图所示。
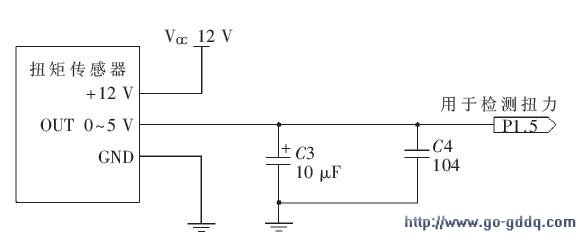
1.3 扭矩检测电路
扭矩传感器选用BS914型扭矩扳手专用信号耦合器。该耦合器可直接输出1 V~5 V电压信号,该扭矩反馈信号经P1.5口输入单片机,经单片机处理转换成数字信号,再与扭矩设置值相比较,进而控制步进电机是否转动,连接电路图如下图所示。
2可控电动扳手控制器软件设计
可控电动扳手控制器软件由控制器初始化程序、键盘扫描及处理程序、步进电机控制程序、扭矩检测程序等组成。控制器通过键盘扫描及处理程序检测扭矩、转角值输入与否,并判断电机转动方向,如正转,则通过步进电机正转控制程序,控制电机正转,并由扭矩检测程序进行输出扭矩的检测,直到扭矩和转角达到预定值为止;如反转,则由步进电机反转控制程序,控制电机反转,直到转角达到为止。扭矩检测利用STC12C5A60S2单片机P1.5ADC口,使用时设置该端口为开漏输入,作为ADC口使用。该程序主要完成ADC口的转换开启、数据读取、软件滤波及输出显示等功能。
本文设计的可控扳手控制器采用STC12C5A60S2单片机作为中央处理芯片,利用较少的外围设备,使其结构简单。对制作的样机进行测试,测试结果显示该样机性能稳定、测量准确、使用方便、技术参数都达到了设计要求,具有一定的实用价值。





