・上一文章:AMOI LC-27HWT3液晶彩电黑屏
・下一文章:基于DSP的交流异步电机高精度调速系统设计
摘 要:在毫米波中继通信设备中,为提高对准精度,缩短对准时间,满足快速反应的要求,并结合毫米波波瓣窄,方向性强的特点,创造性地提出了毫米波天线自动对准平台系统的设计方案。在天线对准过程中,将复杂的的空间搜索转换成两个简单的水平和垂直搜索,简化了搜索控制算法。采用基于ARM 的32 位微处理器LPC2294 进行控制,用步进电机驱动平台和毫米波设备转动,实现毫米波通信设备的快速准确对准。毫米波中继通信设备在国内还处于研发改进阶段,所以该对准平台系统具有极大的参考意义。
毫米波作为一项尖端学科在中继通信方面发挥着越来越重要的作用。但毫米波波瓣窄,方向性强,导致天线对准困难,存在对通时间长,甚至难以对准的问题,不能满足快速反应的要求。因此,需要一种高效的毫米波天线自动对准装置来提高天线架装与对准速度,缩短天线架装与对准时间,以适应快速准确通信的需要。本文从多任务处理和可靠性等角度出发,提出了一种基于ARM7 的32 位微处理器LPC2294 和实时多任务操作系统uC/ OS-Ⅱ步进电机控制平台的方法,将毫米波通信设备架装在平台系统上,从而使毫米波通信设备通过平台的转动快速对准。
1 系统工作原理
在随机状态下,通信设备中两个天线的轴线一般位于不同的平面内,故天线对准实际上是一个较复杂的空间搜索问题。从天线轴线在两正交平面( 方位平面和俯仰平面) 内的投影可以看出,只要分别在方位面和俯仰面内调整即可将两天线对准。这种调整方式将空间搜索转换成两个简单的水平和垂直面搜索,可以简化搜索控制算法。天线对准时,两天线的方位指向误差较大,而俯仰指向误差不会太大。故可先实现方位对准,然后调整俯仰指向,实现两个天线的完全对准。基于上述特点,将天线安装在内框的俯仰平面上,如图1 所示。
实际使用时,通信设备通过平台架装在天线升降器上,最高可以距地面10 m,并可以根据需要升降。采用单轴步进式跟踪方案,俯仰方向和水平方向的转动共用一个电机,通过继电器进行切换。根据平台的转动规律,在ARM 控制器中,编程实现间歇式发送脉冲,由电机驱动器放大脉冲,从而驱动步进电机,最后由机械装置转动平台以及与其相连的通信设备,完成对毫米波通信设备间方向的搜索与对准。
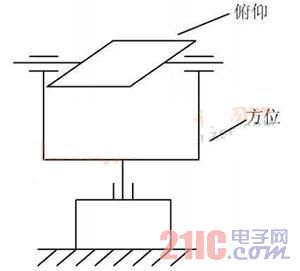
图1 平台结构示意图
2 系统硬件构成
该平台对准系统主要由平台控制板、电机驱动器、步进电机、机械传动装置和相关传感器( 罗盘和GPS)等组成。图2 给出了步进电动机的片外连接硬件结构框图。本文重点介绍其核心 ARM 控制部分。
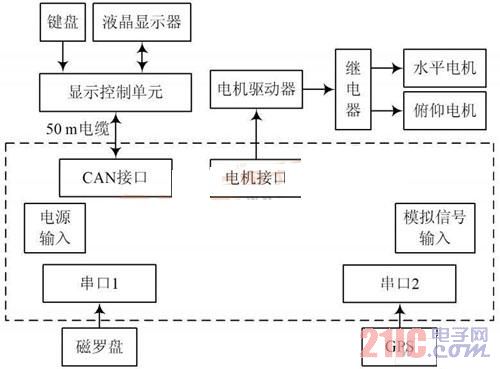
图2 平台控制板硬件结构框图





