・上一文章:安森美半导体针对汽车应用的高能效解决方案
・下一文章:基于DSP的汽车定位防盗系统的设计
2.5 速度自适应程序设计
速度自适应调节算法在图2中已经给出,该算法为离散自适应算法,可直接用于程序设计。离散模型参考自适应分为参考模型和被控对象两部分,所以首先讨论参考模型的实现。对于二阶参考模型其离散方程可表示为:
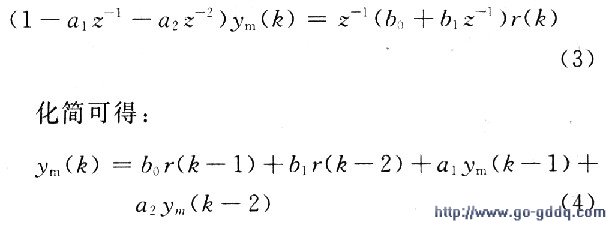
这样可以得到参考模型输出。被控对象速度输出y(k)由速度检测电路检测,可得预报误差:

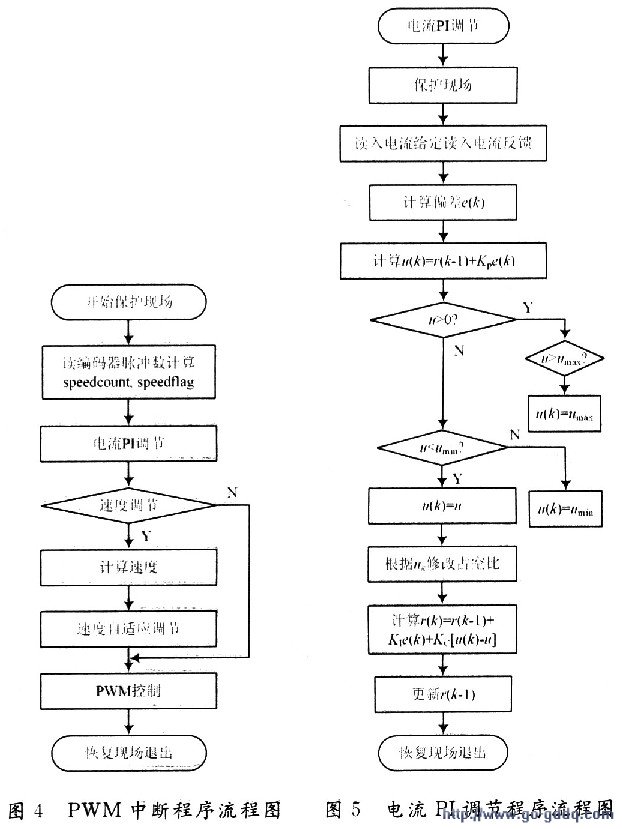
可得u(k)。根据以上分析编写速度自适应控制程序,流程图如图6所示。





