・上一文章:简单的免受超电压汽车视频驱动电路保护程序
・下一文章:基于PC机与单片机的电子油门检测系统
2. 2 两驱动轮控制
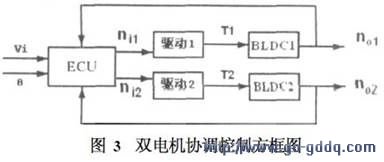
采用双后轮独立驱动方案,每个驱动轮都能独立提供驱动力,功率可以按需要独立分配,其差速功能可以由软件完成,实现电子式差速。
要判断驾驶员的驾驶意图是直驶还是转向,方向盘转角θ是一个重要参数。策略中引入方向盘自由行程角&epSILon;这样一个标志量,当|θ| > ε时,车辆电控单元(ECU)认为驾驶意图为转向,否则为直驶。无论是直驶控制策略还是转向控制策略,其关键点还是通过对目标转速ni1和ni2的调节来实现对两侧电机的控制,从而达到对车体行走轨迹的操控。双电机协调控制方框图见图3。
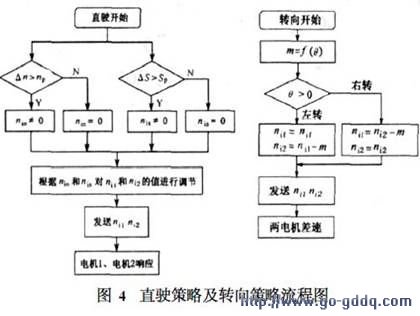
1) 直驶控制策略
在直线行驶中,两侧的电机速度no1 和no2很难达到完全一致,总是会存在一定的速度差△n (定义△n = no1 - no2 ) ,ECU需要对△n进行监测,当△n超过系统允许实时速度差np时,就需要根据△n和np 来对目标转速ni1和ni2进行一定的调节,调节量为nin;为了保证直线行驶的稳定, ECU还需要对两侧电机的累计行程差△S进行监测,当△S超过系统允许实时速度Sp 时,就需要根据△S和Sp对目标转速ni1和ni2也进行一定的调节,调节量为nis。根据累计行程差计算出nis,nis = C3 △S, C—比例常数,根据试验确定,不能过大否则容易引起不稳定,计算结果用于调节两个电机的输入转速消减该累计行程差,实现闭环控制。通过累计行程和速度的双重同步,增强了车辆稳定直线行驶的可靠性。
2) 转向控制策略
转向控制时, ECU根据方向盘转角θ的绝对值大小计算两侧电机的目标转速差m, 根据θ的正负,确定驱动系统中的两个电机谁为外侧电机和谁为内侧电机,外侧电机的目标转速保持当前速度不变,而内侧电机的目标转速则应当在当前目标转速的基础上下调m,从而实现转向。图4为直驶和转向的控制流程图。