・上一文章:简单的免受超电压汽车视频驱动电路保护程序
・下一文章:基于PC机与单片机的电子油门检测系统
3 实验结果
根据上述控制策略,编写了车辆控电子控制单元( ECU)的控制程序并进行了架起试验测试,部分实验结果如图5 所示,大致可以分为以下几个阶段:
1) a点之前,车辆直线行驶。
2)a、b点之间,驾驶员迅速向左打方向盘至一较大角度Θ,然后保持方向盘位置不变,车辆开始向左转向。电机1转速n1保持不变,电机2转速n2向下调整,直至达到目标速差。
3) b、c点之间,方向盘位置保持上一阶段的位置不变,电机1和电机2保持稳定速差,车辆进行转向。
4) c、e点之间,方向盘回到中间位置,驾驶员意图直驶,此时电机1转速n1向下调整,电机2转速n2向上调制,两者在d点汇合;经过de段的调整后在E点达到基本一致。
5) e、f点之间是一段加速过程,使车速达到转向前的速度值。
6) f点之后是车辆保持直线行驶。
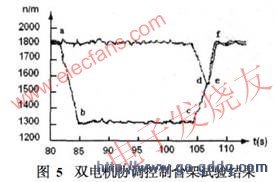
实验结果表明,通过以角度和速度为基础的协调控制策略,车辆电控单元( ECU)可以较好的控制两侧电机,及时准确的实现驾驶员的直线行驶和转向要求。
4 结语
设计实现了一种电助力转向与双后轮驱动技术结合的电动车辆运动控制模型,提出以角度、速度控制为基础的双轮毂电机协调控制策略,为使用双后驱电动车辆的稳定行驶问题提供了解决方案。台架试验结果表明:该控制策略可以较好的满足车辆的直线行驶和转向行驶控制要求,证明了设计的有效性。





