・上一文章:机械制动辅助系统(BA)
・下一文章:AUTOSAR CAN诊断实现
3 GPS定位信息采集和处理的软件实现
本系统的软件开发在可视化开发工具Embedded VisualC++(简称EVC)中,采用MFC编程技术实现。
3.1 GPS数据处理状态转换
GPS与ARM之间用RS232串口方式进行通信,串口对象负责接收数据,并把接收到的数据放置到串口缓冲区。GPS对象按照协议结构负责处理串口对象接收到的数据。图3为GPS数据处理之间的状态转换示意图。GPS数据处理状态共包括4个状态:开始状态、数据帧头状态、GPS数
据正文状态和校验状态。
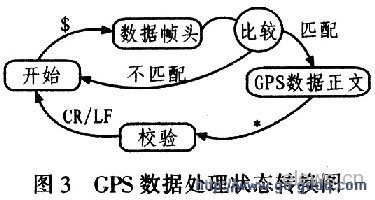
开始状态是一个数据帧的起始状态,它处理和判断数据帧的起始字符$。若起始符号不是其中的$,则一直停留在开始状态,直到$到来位置,数据帧头状态用于判断数据帧的格式是否与我们目前需要的目标数据帧相匹配。如果相匹配,那么将退转到下一个状态:GPS数据正文状态,开始进行数据处理。如果不匹配,则转移到开始状态。
数据处理中用到了缓冲区的概念,它一边累积计算接收的数据的异或和,一边把相应的数据域送入缓冲区。这样既降低了数据提取校验的复杂度,也提高了数据处理的延续性和正确性。当GPS数据正文状态完成,进入“*”字符的时候,将进入数据校验状态,它用于判断数据接收和处理的有效与否。若校验成功,则接收有效,收到CR,LF字符后又重新跳转到开始状态。若校验失败,则放弃处理的数据,直接跳转至开始状态。
3.2 完整GPS数据帧的截取
了解了GPS数据处理的四个状态之间的相互转换,下面论述一个完整的GPS数据帧的提取和处理,它是获取车辆GPS定位数据的关键。一个完整的GPS数据帧的提取流程如图4所示。
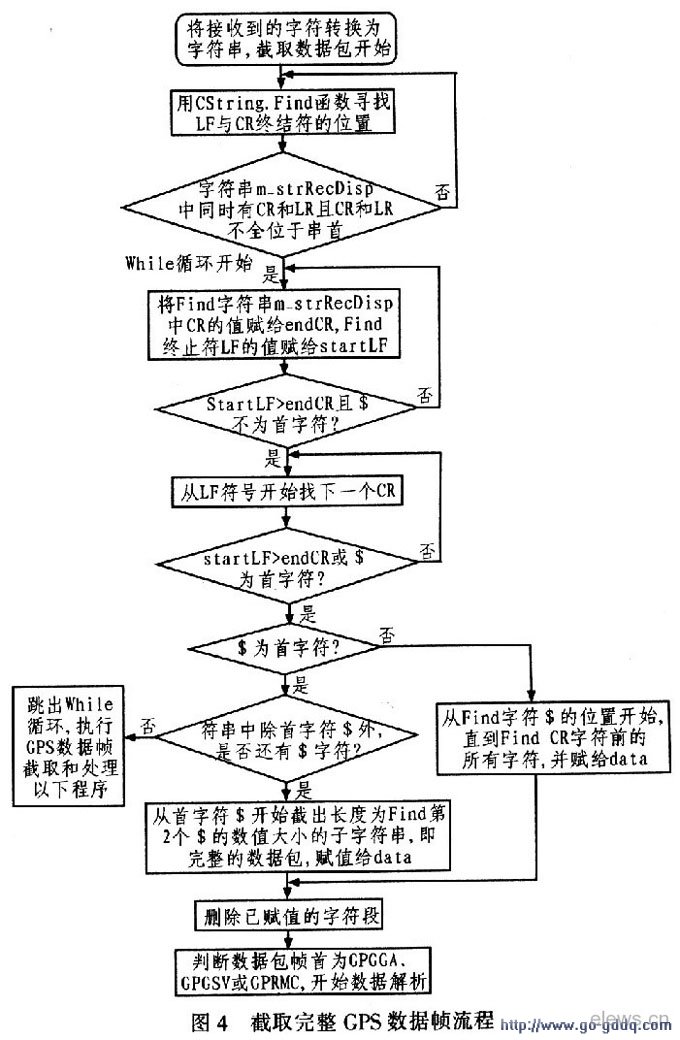
图4中,m_strRecDisp为一个CString变量,用于表示接收数据的字符串,该程序流程中,用到两个最重要的函数即:字符(串)查找函数和字符串截取函数。





