����һ���£���������̬����ȫ����PLC��ʵ�ּ�Ӧ��
����һ���£�S7-400�������˻�����ο����е�Ӧ��
ժҪ�����ŵ��� ���� �����ķ�չ�����������豸�ڹ�ҵ��ũҵ�����õ��˹㷺��Ӧ�á���Щ�豸�еķ���������������г����Ⱦ�������ҵ������������������Σ���벻�㡣��ˣ���߹�����������г����Ϊ�������Ӽ���һ����Ҫ���о��������ص������ģ������Ӧ�������ͳ���PI ��������ɵ�ģ������ӦPI ����������Ʒ������������ַ��������һ����Դ��������У����APFC��ϵͳ��ͨ��MATLAB �������������ģ��PI ������Ƶ�APFC ϵͳ������Ӧ�죬��̬���ȸߣ���������������ŵ��ŵ㡣
����1 ����
�����ڸ�������Ӧ�õĵ��������豸�У��ձ���õ�һ�ֱ��������ǵ��������豸����������� 220V �е磬���� ��ʽ������ �����õ�ֱ���硣����UPS ��Դ �����벿�� ��· ��220V �е羭����ʽ ������ ��������һ����һ���������� ������ ���Եõ����ν�Ϊƽֱ��ֱ����ѹ����������������������ɵ������˲���·���з����ԣ���ˣ���Ȼ���뽻����ѹ�IJ��������Ҳ��������뽻�������IJ���ȴ���ػ��䣬������״������״�ĵ������д���г��������г���������������ʹ��������г����Ⱦ��ͨ��ʹ�ù�������У����PFC���������������˵Ĺ�����������������У���ַ�Ϊ��Դ��������У������Դ��������У����������Դ��������У�����������ѹ��Χ�㣬�ܻ�ýϸߵĹ����������ŵ����ù㷺Ӧ�á�
�������ڹ�������У��������һ�����з����ԣ�ʱ���ԺͲ�ȷ���Եĸ��ӿ��ƶ�����ѧģ�ͺ��ѽ���������Ŀ��Ʒ�������ɿ�������ģ���������۵ij��֣������ֲ���һȱ�㡣ģ�����ƵĶ�����Ҫ��ȷ����ѧģ�͡�����PI����������һ����³���ԣ�����ʵ�֣���̬������ƾ��ȸߵ��ص㣬��ˣ����Ľ�ģ�����ƺͳ���PI���������������Դ��������У����·��
����2 APFC ��·���˺� ���Ƶ�· ���
����2.1 ����ѡ��
�����ӵ�·����ԭ������˵���������Ӽ����еļ��ֻ������˽ṹ��Buck�pBoost�pSEPIC ����CUK �任�������Թ���APFC ��·��������Boost ���˽ṹ��ɵ�APFC ���������ѹ��Χ�㣬�������������EMI С���ŵ���õ��㷺��Ӧ�á���ˣ�����Ҳ����Boost ���˽ṹ��
����2.2 ���Ƶ�·���
����Boost ��3 �ַ���ʵ��APFC����������ֵ���Ʒ��������ͻ����Ʒ���ƽ���������Ʒ� ����ƽ���������Ʒ������˵������ƻ��͵�ѹ���ƻ���˫�ջ����ƣ���ˣ�ƽ���������Ʒ�����ƽ�������� ��� �� ��ֵ�������С�������ѹ�ȶ��Ժõ��ص㡣���ԣ����İ���ƽ���������Ʒ��������APFC ���Ƶ�·��ƽ���������Ƶ�APFC ԭ��ͼ��ͼ2-1������Ҫ����ԭ���ǣ�
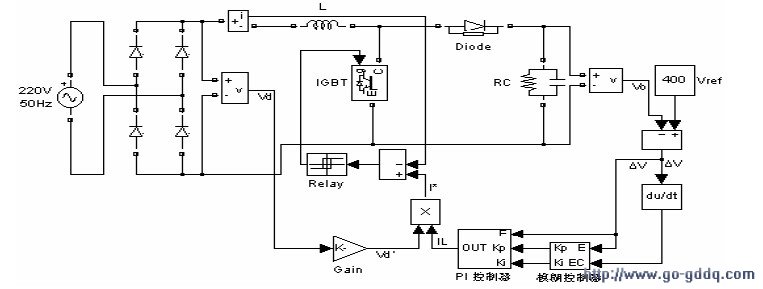
ͼ2-1 ƽ���������Ƶ�APFC ԭ��ͼ
���������ѹVO �����ӷ�����ο���ѹVref �Ƚϵõ�ƫ���ѹ��V��ƫ���ѹ��V ����ģ����������PI ������������õ��Ŀ�����IL, ������ �����ѹVd �������ֵ���õ���ֵΪ1 �����Ұ벨Vd����IL ��Vd�������˷�����˵õ���е���ָ��I*��I*�Ƿ�ֵ���Կ��������ѹVO����λ��Vd ��ͬ�����Ұ벨������ʵ�ʵĵ��������IL ͨ�� IGBT ��ͨ��������I*��ʹ����������һ������������ﵽ0.97-0.99��
����3 ����Ӧģ��PI �����������
����3.1 �����������˼��
��������PID��������ṹ����̬������ƾ��ȸ߾���һ����³���ԣ���ˣ����������㷺Ӧ���ڹ�ҵ���̿��ơ����ǣ�ʵ���кܶҵ���̲�ͬ�̶ȵľ��з����ԡ�����ʱ���Ժ�ģ�Ͳ�ȷ���ԣ���˳����PID����������ʤ�Ρ���ģ�����ƾ��в���Ҫ֪�����ض���ľ�ȷ��ѧģ�͡�ģ�����Ƶ�ʵ�ʽ���������ר��֪ʶ������������Ա�ľ���ת����ģ����������Թ���ͨ��ģ��������ģ�����ߣ�ʵ�ֶԸ���ϵͳ�Ŀ��ơ����ڹ�������У���Ŀ���������ʱ���ԣ���Ҫ��ʱ�����ܿض���ı仯��������������ˣ�ģ������Ӧ���Ƹ��ʺϹ�������У������Ϊģ���������������ֵ����ã���ˣ����������ģ������ӦPI��������
����3.2 ģ������ӦPI�������Ĺ���ԭ��
����ģ������ӦPI������ϵͳ��PI��������ģ������ϵͳ�����ֹ��ɣ�PI������ʵ�ֶ�ϵͳ�Ŀ��ƣ�ģ������ϵͳ�����E�����仯EC��Ϊ����,����PI������������������ƫ��E��ƫ��ı仯EC֮���ģ����ϵ��������ʱ���ϼ��ƫ��E��ƫ��仯EC��ͨ������ȷ���Ĺ�ϵ������ģ�������ķ�����������PI������������������ʵ������Ӧ���ơ�
����3.3 ģ������ӦPI������������Ӧ����
������1����ƫ��E�ϴ�ʱ��Ϊʹϵͳ���нϺõĸ������ܣ�Ӧȡ�ϴ��KP��ͬʱΪ����ϵͳ��Ӧ���ֽϴ�ij�����Ӧ�Ի������ü������ƣ�ͨ��ȡKi=0��
������2����ƫ��E��ƫ��仯EC�����еȴ�Сʱ��Ϊʹϵͳ��Ӧ���н�С�ij�����KPӦȡ��СЩ������������£�Ki��ȡֵҪ�ʵ���
������3����ƫ��E��Сʱ��Ϊʹϵͳ���нϺõ��ȶ����ܣ�KP��Ki��Ӧȡ�ô�Щ��
�������⣬���ݿ���ר�ҵ�֪ʶ������������Ա�ľ���֪��������ȷ��ϵͳ�ڳ�����������£����E�����仯��ECԽ��ϵͳ�в�ȷ������Խ���෴�����E�����仯��ECԽС��ϵͳ�в�ȷ������ԽС��E��ECͬ�ţ����ֵԶ�����ֵ��E��EC��ţ�����������ֵ����������E��EC��ϵͳ��ȷ�����Ĺ��ƣ��Ϳ�ʵ�ֶ�PI������KP��Ki�ĵ������ƣ���if-then������E��EC��KP��Ki֮��Ĺ�ϵ��
����3.4 ��������ģ���������Ⱥ�����ȷ��
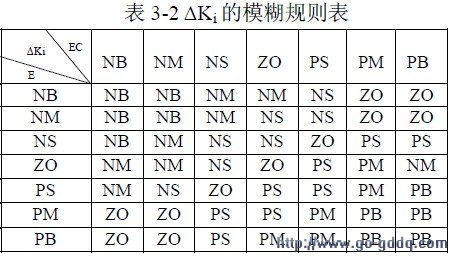
����ģ��PI���Ƹ���ϵͳ���еIJ�ͬ״̬������KP��Ki���ߵĹ�����ȡ���E�����仯EC������ϵ���仯��KP�ͻ���ϵ���仯��Ki����ģ����Ϊ[NB��NM��NS��ZO��PS��PM��PB]�߸�ģ��ֵ����ֱ����[�����С���С���㡢��С�����У�������]�����E�����仯EC������ϵ���仯��KP�ͻ���ϵ���仯��Ki��������Ϊ[-6��-5��-4��-3��-2-��1��0��1��2��3��4��5��6]�����������κ���ͼ�μ�࣬ռ �ڴ� С�������ٶȿ죬���ԣ����E�����仯EC������ϵ���仯��KP�ͻ���ϵ���仯��Ki����������ѡ�������κ�����3.5 ģ������ӦPI����������Ľ�����
�������ݹ��������Ա�ļ���֪ʶ��ʵ�ʲ������飬�������E�����仯EC�����ϵ���仯��KP������ϵ���仯��Ki��ģ����������3-1��3-2��ʾ��

��������ģ������������ԶԦ�KP����Ki���ж�̬��������KP0��Ki0Ϊ���ó������������õ���KP��Ki��ʼֵ����PI���Ʊ���ʽΪ��

����4 ģ��PI���Ƶ�APFCϵͳ��MATLABϵͳ����
����4.1 �����·�Ľ���
������MATLAB/Simulink�½��������·ͼ��ͼ4-1��
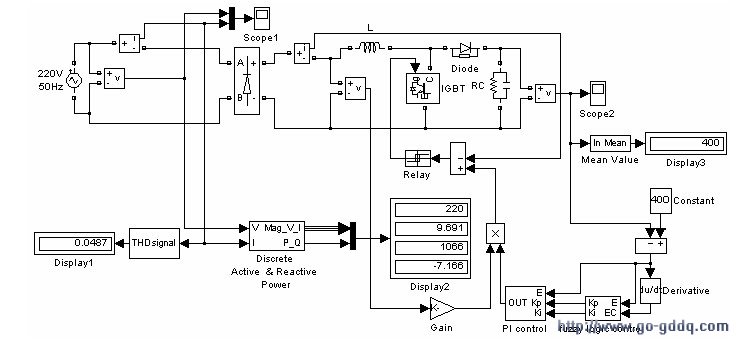
ͼ4-1 MATLAB/Simulink �����ķ���ͼ
����4.2 ��Ҫ��������
���������ֵ����
������������

������ѹ����ϵ��

�������ܵ��ֵ

�������������ֵ

����4.3 �������������
���������ѹ��ЧֵΪ220V��Ƶ��50Hz�������ѹ�ο�ֵ 400V ������ ���� 160������ ������ �������У�RS=1e5��CS=1e-6��Ron=1e-3��Lon=0��Vf=0��IGBT��Ron =1e-3��Rd=1e-2��RS =1e5��CS =inf�������ܵ�Ron =1e-3��Vf =0.8��RS =500��CS =250e-9��KP��Ki��ʼֵ�ֱ�Ϊ0.02��5��
����������������ӷֱ�ȡ1.2��0.015������ı������ӷֱ�ȡ1/600��1/6������powergui���������ó���ɢ��ģ�ͣ����沽��Ϊ1e-6��
����4.4 ����������
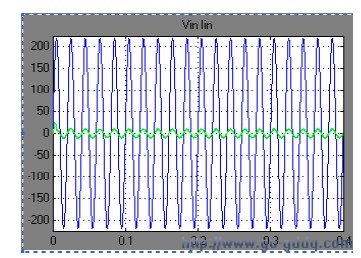
������ͼ4-4���Կ�����������Ѿ����������ѹ�����γ����ҡ�ͨ�������·ͼ�� ������ �� �������㹦��������

 ��
��
��ͼ 4-4 �����ѹ�p�������沨��
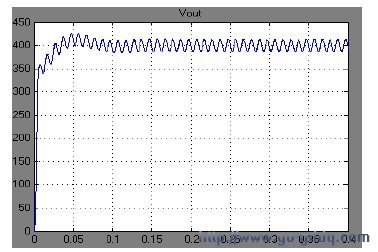
����ͼ4-5 �����ѹ���沨��
����5 ����
����ͨ��MATLAB������Կ�����ģ��PI���������������������������ѹ���ȶ�ϵͳ�����ѹ�����������ӽ�1�Ŀ���Ŀ�꣬˵��������Ʒ�����ʵ���С���MATLAB������ʹ��Ҳ��������Ƴɱ��������˿������ڡ�





